為數(shù)字溫度傳感器選擇系統(tǒng)接口的方法

本文引用地址:http://www.czjhyjcfj.com/article/161203.htm
1. SPI
SPI 是一種四線制串行總線接口,為主/從結(jié)構(gòu),四條導(dǎo)線分別為串行時(shí)鐘(SCLK)、主出從入(MOSI)、主入從出(MISO)和從選(SS)信號(hào)。主器件為時(shí)鐘提供者,可發(fā)起讀從器件或?qū)憦钠骷僮鳌_@時(shí)主器件將與一個(gè)從器件進(jìn)行對(duì)話。當(dāng)總線上存在多個(gè)從器件時(shí),要發(fā)起一次傳輸,主器件將把該從器件選擇線拉低,然后分別通過 MOSI 和 MISO 線啟動(dòng)數(shù)據(jù)發(fā)送或接收。
SPI 時(shí)鐘速度很快,范圍可從幾兆赫茲到幾十兆赫茲,且沒有系統(tǒng)開銷。SPI 在系統(tǒng)管理方面的缺點(diǎn)是缺乏流控機(jī)制,無(wú)論主器件還是從器件均不對(duì)消息進(jìn)行確認(rèn),主器件無(wú)法知道從器件是否繁忙。因此,必須設(shè)計(jì)聰明的軟件機(jī)制來處理確認(rèn)問題。同時(shí),SPI 也沒有多主器件協(xié)議,必須采用很復(fù)雜的軟件和外部邏輯來實(shí)現(xiàn)多主器件架構(gòu)。每個(gè)從器件需要一個(gè)單獨(dú)的從選擇信號(hào)。總信號(hào)數(shù)最終為 n+3 個(gè),其中 n 是總線上從器件的數(shù)量。因此,導(dǎo)線的數(shù)量將隨增加的從器件的數(shù)量按比例增長(zhǎng)。同樣,在 SPI 總線上添加新的從器件也不方便。對(duì)于額外添加的每個(gè)從器件,都需要一條新的從器件選擇線或解碼邏輯。圖2 顯示了典型的 SPI 讀/寫周期。在地址或命令字節(jié)后面跟有一個(gè)讀/寫位。數(shù)據(jù)通過 MOSI 信號(hào)寫入從器件,通過 MISO 信號(hào)自從器件中讀出。圖3顯示了 I2C總線/SMBus以及SPI的系統(tǒng)框圖。
2. I2C總線
I2C 是一種二線制串行總線接口,工作在主/從模式。二線通信信號(hào)分別為開漏 SCL 和 SDA 串行時(shí)鐘和串行數(shù)據(jù)。主器件為時(shí)鐘源。數(shù)據(jù)傳輸是雙向的,其方向取決于讀/寫位的狀態(tài)。每個(gè)從器件擁有一個(gè)唯一的 7 或 10 位地址。主器件通過一個(gè)起始位發(fā)起一次傳輸,通過一個(gè)停止位終止一次傳輸。起始位之后為唯一的從器件地址,再后為讀/寫位。
I2C總線速度為從0Hz到3.4MHz。它沒有SPI 那樣快,但對(duì)于系統(tǒng)管理器件如溫度傳感器來說則非常理想。I2C 存在系統(tǒng)開銷,這些開銷包括起始位/停止位、確認(rèn)位和從地址位,但它因此擁有流控機(jī)制。主器件在完成接收來自從器件的數(shù)據(jù)時(shí)總是發(fā)送一個(gè)確認(rèn)位,除非其準(zhǔn)備終止傳輸。從器件在其接收到來自主器件的命令或數(shù)據(jù)時(shí)總是發(fā)送一個(gè)確認(rèn)位。當(dāng)從器件未準(zhǔn)備好時(shí),它可以保持或延展時(shí)鐘,直到其再次準(zhǔn)備好響應(yīng)。
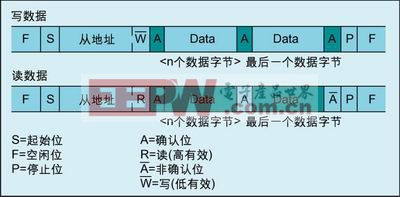 |
圖4:I2C總線/SMBus的典型讀/寫操作。 |
I2C允許多個(gè)主器件工作在同一總線上。多個(gè)主器件可以輕松同步其時(shí)鐘,因此所有主器件均采用同一時(shí)鐘進(jìn)行傳輸。多個(gè)主器件可以通過數(shù)據(jù)仲裁檢測(cè)哪一個(gè)主器件正在使用總線,從而避免數(shù)據(jù)破壞。由于 I2C總線只有兩條導(dǎo)線,因此新從器件只需接入總線即可,而無(wú)需附加邏輯。圖4 顯示了典型的 I2C總線讀/寫操作。
3. SMBus
SMBus是一種二線制串行總線,1996年第一版規(guī)范開始商用。它大部分基于I2C總線規(guī)范。和 I2C一樣,SMBus不需增加額外引腳,創(chuàng)建該總線主要是為了增加新的功能特性,但只工作在100kHz且專門面向智能電池管理應(yīng)用。它工作在主/從模式:主器件提供時(shí)鐘,在其發(fā)起一次傳輸時(shí)提供一個(gè)起始位,在其終止一次傳輸時(shí)提供一個(gè)停止位;從器件擁有一個(gè)唯一的7或10位從器件地址。
SMBus與I2C總線之間在時(shí)序特性上存在一些差別。首先,SMBus需要一定數(shù)據(jù)保持時(shí)間,而 I2C總線則是從內(nèi)部延長(zhǎng)數(shù)據(jù)保持時(shí)間。SMBus具有超時(shí)功能,因此當(dāng)SCL太低而超過35 ms時(shí),從器件將復(fù)位正在進(jìn)行的通信。相反,I2C采用硬件復(fù)位。SMBus具有一種警報(bào)響應(yīng)地址(ARA),因此當(dāng)從器件產(chǎn)生一個(gè)中斷時(shí),它不會(huì)馬上清除中斷,而是一直保持到其收到一個(gè)由主器件發(fā)送的含有其地址的ARA為止。SMBus只工作在從10kHz到最高100kHz。最低工作頻率10kHz是由SMBus超時(shí)功能決定的。











評(píng)論