洗碗機水泵驅動設計

目前很多洗碗機水泵的驅動部分使用了三相永磁同步電動機(PMSM)。PMSM要求智能驅動系統,其中所包含的微控制器用來解析轉子位置并實現控制環路,從而驅動電機旋轉。 新型的由微處理器控制的洗碗機在節水節電的同時,能夠更加靜音。
由于PMSM中沒有換向器(即電刷),因此電機控制技術必須基于對轉子位置的了解。該位置必須是可測量或可估計的。測量轉子位置要求在電機軸上安裝光編碼器(傳感器)等設備,而這樣做會大幅增加系統成本。如果可以用一個有效的方法估算轉子位置,那么就可以不使用傳感器。根據電機運轉狀態(零速度、低速、高速等)的不同,用來估算轉子位置的方法有很多種。電機高速運轉時,可以利用觀測儀就低角誤差、動態性能、錯誤過濾等方面獲得良好結果。本文描述的解決方案使用的是“反電勢觀測儀”,它基于電機的數學模型。
用來驅動PMSM的高性能技術基于磁場定向控制(FOC),有時簡稱為“矢量控制”。這種方法的目的,是無論機械負載轉矩變化和其他干擾如何,都能夠以精確追蹤命令軌跡的方式獨立控制氣隙中的電機轉矩和磁鏈,并實現盡可能快的瞬時響應。FOC方法加上估算轉子位置的反電勢觀測器,是驅動基于 PMSM洗碗機水泵的理想解決方案。
洗碗機水泵
家電制造商最近已經開始使用PMSM來驅動洗碗機水泵,典型參數包括:
– 230V的線路電壓(歐洲)
– 6或8個磁極
– 80W額定功率
– 在d、q軸下定子相位等效電感Ld與Lq的關系為-Ld=Lq
洗碗機水泵控制算法在閉合的電流和速度環路中運行。洗碗機內的水壓用液壓系統(水管、噴水器等)的物理設計來表示,可以通過變換水泵的速度進行控制。
典型的洗碗機水泵運行特性包括103kPa(15psi)至827kPa(120psi)的水壓范圍和1,500rpm至3,500rpm 的機械泵速度。
PMSM電機控制方法
驅動PMSM的比較適合的控制方法有數個。根據應用性能和成本要求,本節描述的矢量控制方法(也稱為FOC)比較適當。FOC控制方法的基本原理如圖1中所述。
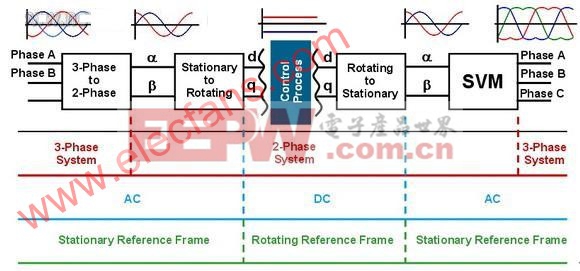
圖1:FOC控制方法原理
矢量控制方法通過Clarke和Park變換,將定子電流空間矢量分解為產生磁場和轉矩的電流分量。一旦分解,氣隙磁鏈(d軸)和電磁轉矩(q軸)可以獨立進行控制。這種方法能夠以類似于他勵直流電機的方式控制PMSM。
矢量控制方法的必要信息包括轉子的位置和速度,以及電機磁化磁鏈的位置。傳統運動控制系統使用解析器或編碼器。這樣,監控轉子所需的傳感器、配線和連接器就增加了系統成本,降低了可靠性。對于成本敏感型應用,必須以其他方式獲取轉子位置。不采用位置傳感器的算法稱為“無傳感器控制”方法。圖2中的框圖顯示了實施的無傳感器矢量控制算法。位置和速度采用反電勢觀測儀及追蹤觀測儀進行估算,如圖所示。
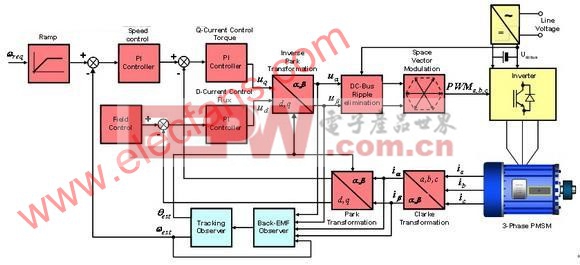
圖2:PMSM矢量控制算法框圖
PMSM 電機的數學模型
電機是一個動態系統,因此我們用一組微分方程式對其進行描述。alpha/beta靜止參照系中的定子電壓方程式可表達如下:

隱極電機的定子磁鏈可以表述為:

這樣,電機的電磁轉矩就是:

其中pp為電機極對數量。
該數學模型描述了該洗碗機水泵應用中使用到的PMSM 的行為,因此它可用于反電勢觀測儀。
轉子位置和速度估算
一般來說,“estimator”是一個估算狀態變量的動態系統。estimator實施從根本上說有兩種形式:開環和閉環。在閉環estimator情況中,估算值和實際狀態變量之間的誤差作為校正項,調整響應。閉環estimator也稱為觀測儀。
反電勢觀測儀基于對電動勢的估算。反電勢模型包括來自傳統反電勢(轉子磁鐵)的感應電壓和來自定子電感的感應電壓。這讓我們能夠通過對反電勢的估算來估計轉子位置。這種方法在低速時有一定的局限性,因為反電勢信號非常弱,幾乎為零,而且觀測儀發散。當達到有效估算所需的最低運算速度時,反電勢觀測儀估算轉子位置,可將其作為矢量控制算法的反饋信號。正確的觀測儀運算的最低運算速度(電壓)閾值取決于電機構造,必須根據電機參數計算或直接在電機上進行測試。
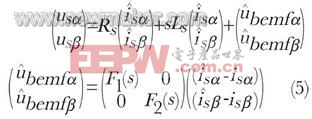
觀測儀算法處理從PMSM 數學模型中得到以下方程式:

觀測儀本身估算相位電流和反電勢值。估算得出的電流與實際測量得到的電流進行比較,誤差作為校正信號返回觀測儀結構。這就使得觀測儀保持穩定和集中,因此狀態變量將接近實際值。反電勢觀測儀可用以下方程式:











評論