噴漿機器人電液伺服系統的模糊自適應整定方法

1 引言
噴漿機器人是用來在礦山巷道支護中進行自動噴射混凝土的機械電子裝置,是一個高度非線性、強耦合和變參數的多變量系統,其主要控制系統是一個由微機控制的電液伺服系統。電液伺服控制可實現位置控制、速度控制、壓力控制和同步控制,由于其顯著優點及易于實現自動化的特點,而被廣泛應用于工業領域且發展迅速。電液伺服系統綜合了電氣和液壓兩方面的特長,具有體積小、質量輕、響應速度快、輸出功率大、控制精度高、信號處理靈活、易于實現各種參量的反饋等優點,在現代工業機器人技術中占有舉足輕重的地位。
PID控制在生產過程中是一種最普遍的控制方法,在冶金、機械、化工等行業中獲得廣泛應用。實際中,對于電液伺服系統而言,傳統PID控制算法能夠很好的完成預定的控制要求。然而,PID控制器的參數很難一次確定下來,其參數的選取往往取決于經驗,并且在實際中微調也比較困難。然而,利用模糊控制理論來自適應整定反饋控制律中的PID參數,它無需精確確定對象模型,只需將操作人員長期積累的經驗知識用模糊規則模型化,然后運用模糊推理獲得最優的控制參數,能夠很好的克服這方面的不足。文獻針對存在參數不確定性的電液位置伺服系統的跟蹤控制問題,基于滑模控制理論,提出了一種具有參數自適應能力的自適應滑模控制方法。文獻在不影響滑模變結構控制魯棒性的情況下,在常規的滑模變結構控制中引入模糊自學習控制方法。
本文將以控制某型噴漿機器人的重要關節--槍桿旋轉的電液位置伺服控制系統為研究對象,建立噴漿機器人槍桿的旋轉電液位置伺服系統的數學模型,并設計了一種新的電液伺服系統的模糊自適應整定PID控制方法,把經典的PID控制與先進的模糊控制相結合,然后運用推理實現對PID參數的在線最佳調整。論文給出了控制算法的詳細的設計過程和步驟,與傳統PID控制相比,有效抑制了系統擾動和不確定性,提高了電液伺服系統的動態特性。
2 電液伺服系統模型
液壓伺服系統一般由反饋測量元件、輸入元件、轉換放大裝置、執行機構和控制對象五個部分組成。其典型的結構如圖1所示: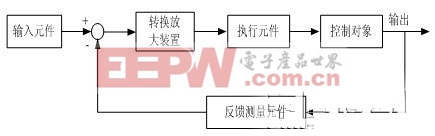
圖1 液壓伺服系統的構成
本設計以控制某型噴漿機器人槍桿旋轉的電液位置伺服控制系統為研究對象,系統采用了電液伺服閥控制液壓馬達的控制方式,采用文獻中模型,依據電液伺服閥液壓控制回路實際情況,我們畫出其控制系統框圖如圖2所示: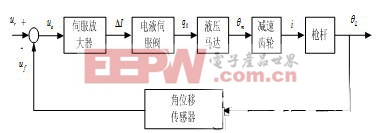
圖2 控制系統方框圖
根據系統的具體要求,選擇合理的伺服放大器,伺服閥,液壓馬達,槍桿和傳感器,計算確定各自的傳遞函數,根據各個環節的傳遞函數可以得到伺服系統的閉環傳遞函數為: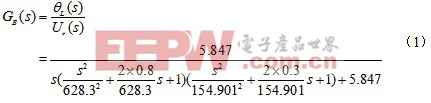
式中,![]() 為工作臂的轉角,
為工作臂的轉角,![]() 為輸入控制信號。
為輸入控制信號。
3 模糊自適應控制器設計
3.1 PID控制
在模擬控制系統中,控制器最常用的控制方式是PID控制。模擬PID控制系統原理框圖如圖3所示: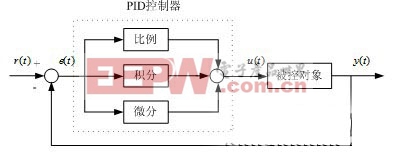
圖3 PID控制系統原理框圖
PID的控制率為:
3.2 模糊自適應PID控制
由于PID控制器參數很難一次確定下來,其參數的選取往往取決于經驗,實際中采用試湊法進行PID參數整定時,過程繁雜.非常耗時,而且難得到最優的PID控制器參數。總而言之,PID控制器的參數整定需要經過大量的、反復的實驗才能確定較優值。然而,利用模糊控制理論來自適應整定反饋控制律中的PID參數,它無需精確確定對象模型,只需將操作人員長期積累的經驗知識用模糊理論控制規則模型化,然后運用模糊推理獲得最優的控制參數。
因此,我們設計電液伺服系統模糊控制框圖如圖4所示: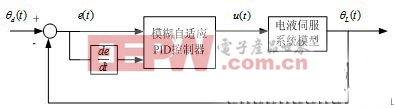
圖4 模糊自適應PID電液伺服控制器
上圖所示的控制系統是一個閉環反饋系統,誤差![]() ,誤差變化為
,誤差變化為![]() ,輸入信號為工作臂期望轉角
,輸入信號為工作臂期望轉角![]() ,輸出信號為工作臂實際轉角
,輸出信號為工作臂實際轉角![]() ,
,![]() 是電液伺服系統的控制輸入,也是模糊自適應控制器的輸出。
是電液伺服系統的控制輸入,也是模糊自適應控制器的輸出。










評論