神經(jīng)模糊控制在SAW壓力傳感器溫度補(bǔ)償中的應(yīng)用

鑒于BP神經(jīng)網(wǎng)絡(luò)訓(xùn)練過(guò)程需要對(duì)所有權(quán)值和閥值進(jìn)行修正,是一種全局逼近神經(jīng)網(wǎng)絡(luò),但訓(xùn)練速度較慢,不適用實(shí)時(shí)性較強(qiáng)場(chǎng)合,故采取了局部逼近網(wǎng)絡(luò)——徑向基網(wǎng)絡(luò)。算法訓(xùn)練關(guān)系式如下:
節(jié)點(diǎn)輸出為
式中a1為節(jié)點(diǎn)輸出;b為神經(jīng)元閥值;Wij為接點(diǎn)連接權(quán)值;f為傳遞函數(shù)。
權(quán)值修正
式中z為新學(xué)習(xí)因子;h為動(dòng)量因子;Ej為計(jì)算誤差。
誤差計(jì)算
式中tPI為i節(jié)點(diǎn)期望輸出值;aPI為i節(jié)點(diǎn)計(jì)算輸出值。
由于神經(jīng)網(wǎng)絡(luò)的神經(jīng)元個(gè)數(shù)不確定性,經(jīng)大量數(shù)據(jù)的實(shí)驗(yàn)驗(yàn)證,本文選取輸入層有2個(gè)神經(jīng)元,隱含層有4個(gè)神經(jīng)元。輸出層只有1個(gè)神經(jīng)元。采用只有1個(gè)隱含層的三層網(wǎng)絡(luò)對(duì)控制基進(jìn)行學(xué)習(xí)記憶。把每條控制規(guī)則作為神經(jīng)網(wǎng)絡(luò)的樣本進(jìn)行訓(xùn)練學(xué)習(xí),從而能實(shí)現(xiàn)這個(gè)規(guī)則基的神經(jīng)網(wǎng)絡(luò)權(quán)系數(shù)。
基于神經(jīng)網(wǎng)絡(luò)在推理方面不足,故借助于模糊控制強(qiáng)大的推理功能,提取有效的條件語(yǔ)句,進(jìn)而加快網(wǎng)絡(luò)的訓(xùn)練速度。選取偏差E和偏差變化率△E作為輸入和控制量U作為輸出。偏差E和偏差變化率△E的模糊量分別為大(L),中(M),小(S),創(chuàng)立描述條件推理表格如表1。
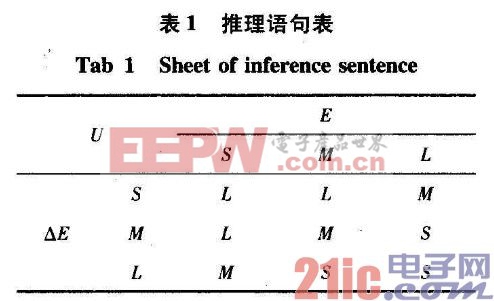
橫行元素表示E的模糊量,豎行表示△E的模糊量,兩者交叉為控制量U的模糊量。根據(jù)表中數(shù)據(jù),可知共有3×3種推理語(yǔ)句,采用推理法將條件語(yǔ)句表簡(jiǎn)化得出以下4條語(yǔ)句:

將產(chǎn)生貢獻(xiàn)的語(yǔ)句選出,可能存在的個(gè)數(shù)為20,21,…,2n。這樣,減少了冗余的推理語(yǔ)句,有利于網(wǎng)絡(luò)訓(xùn)練速度的快速進(jìn)行。












評(píng)論