基于神經網絡的感應電動機直接轉矩控制研究

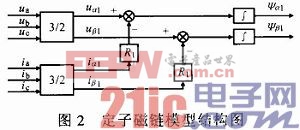
由式(2)可得定子磁鏈模型結構如圖2所示,在靜止兩相坐標系下電磁轉矩表達式為:
T=npLm(iβiα2-iα1iβ2) (3)本文引用地址:http://www.czjhyjcfj.com/article/159427.htm
兩相靜止坐標系下的磁鏈方程為: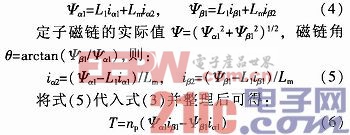
由式(6)得轉矩模型結構圖如圖3所示。

在DTC技術中,其基本控制方法就是通過電壓空間矢量us(t)來控制定子磁鏈的旋轉速度及定子磁鏈運行狀態,以改變定子磁鏈的平均旋轉速度的大小,達到控制轉矩的目的。DTC系統的核心問題:①轉矩和定子磁鏈反饋信號的計算模型;②如何根據兩個Bang-Bang控制器的輸出信號來選擇電壓空間矢量和逆變器的開關狀態。
3 神經網絡PID控制器的設計
系統中應用的神經網絡控制器由BP神經網絡和控制器兩部分構成。神經網絡根據系統的運行狀態調節控制器的參數,以期達到最佳的控制效果。人工神經網絡的神經元結構如圖4所示。
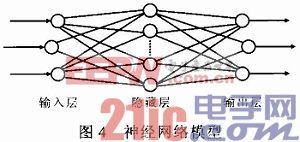
人工神經網絡是基于人腦的神經元結構的電子學模型,一個神經網絡的基本執行要素是神經元。神經網絡依賴于神經元的層數。人工神經網絡對知識的掌握是通過對樣本的學習實現的。通過學習大量的實例,網絡用嘗試錯誤的方法來不斷減小錯誤,修正權值,從而掌握蘊含于樣本的知識,網絡通過權值的調整記錄所學過樣本,并掌握輸入與輸出之間的關系。正是因為它的可任意逼近非線性模型特性,所以十分適用于交流調速系統的控制。人工神經網絡在交流調速控制系統中的應用包括神經網絡辨識器和神經網絡控制器的設計。在傳統的數字PID控制方式下,采用的經典算式為增量式PID算法:
u(k)=u(k-1)+△u(k)=u(k-1)+kp[e(k)-e(k-1)]+kie(k)+kd[e(k)-2e(k-1)+e(k-2)] (7)
神經網絡根據系統的運行狀態調節PID控制器的參數,使輸出層神經元的輸出狀態對應于PID控制器3個可調整參數kp,ki,kd。通過神經網絡的自學習,權系數調整,使神經網絡輸出對應于某種最優控制規律下的PID控制器參數。
輸入層神經元個數選為3,誤差量x1(k)=e(k),x2(k)反映誤差的累計效果,![]() ,x3(k)反映誤差變化快慢,x3(k)=e(k)-e(k-1)。輸出層的神經元個數選為3,輸出節點分別對應kp,ki,kd。由于該參數不能為負數,所以輸出層神經元的激發函數取非負的Sigmoid函數。隱藏層的神經元個數可由經驗公式q=(n+m)1/2+f確定,其個數選為4。
,x3(k)反映誤差變化快慢,x3(k)=e(k)-e(k-1)。輸出層的神經元個數選為3,輸出節點分別對應kp,ki,kd。由于該參數不能為負數,所以輸出層神經元的激發函數取非負的Sigmoid函數。隱藏層的神經元個數可由經驗公式q=(n+m)1/2+f確定,其個數選為4。
輸出層神經元的激發函數![]() 。按梯度下降法修改網絡的權系數,即按照e(k)對權系數的負梯度方向搜索調整,并附加一個使搜索快速收斂的全局極小慣性項。
。按梯度下降法修改網絡的權系數,即按照e(k)對權系數的負梯度方向搜索調整,并附加一個使搜索快速收斂的全局極小慣性項。

電動機相關文章:電動機工作原理設計
施密特觸發器相關文章:施密特觸發器原理





評論