基于全球星實現無人機遠程通信

無人飛行器(Unmanned Aerial Vehicle,UAV)可分為無人機、導彈和靶標三大類。其中無人機已被廣泛應用于諸如偵察、監視、誘餌、電子戰、通信中繼、農業勘測、氣象、交通、科學研究、民用導航、環境保護、自然災害的監視與救援等領域。與有人駕駛的飛機相比,無人機機動性能好,過載能力強,不存在飛行員傷亡;與偵察衛星相比,無人機飛行高度低,活動范圍可控,部署方便,造價低廉。目前,世界各國都在積極研制各種新型無人機。
新型無人機對通信設備性能有了更高的需求,在通信距離上已超出視距范圍,在通信帶寬上需要能夠傳輸圖像、視頻等綜合信息。這給無人機通信設備的研制提出了新的課題。根據研究表明,數字微波通信和衛星通信可以滿足無人機與地面之間遠程綜合信息傳輸的需求。
l 全球星系統性能分析
全球星系統是由美國勞拉公司(Loral Corpara-tion)和高通公司(Qualcomm)倡導發起的衛星移動通信系統。全球星系統主要由三部分組成:空間段、地面段、用戶段。
空間段由48顆衛星加8顆備份星組成。軌道高度
約為1 414 km,傳輸時延和處理時延小于300 ms,因此,用戶感覺不到時延。整個系統的覆蓋區為南北緯70°以內的地區。各個服務區總是被2~4顆衛星覆蓋,用戶可隨時接人該系統。話音傳輸速率有2.4/4.8/9.6 Kb/s三種,數據傳輸速率為7.2 Kb/s(持續流量)。衛星采用碼分多址方式(CDMA),碼元帶寬為1.23 MHz。衛星定位精度最高可達300 m。
地面段包括全球星控制中心和網絡關口站(簡稱:網關)。每個網關可同時與3顆衛星通信,把來自不同衛星或同一衛星的不同數據流信號組合在一起,以提供無縫隙的覆蓋。每一個用戶終端可通過一顆或幾顆衛星和網關實現與全球任何地區的通信。在我國境內設有一個網關。
用戶段指的是使用全球星系統業務的用戶終端設備。用戶終端設備包括手持式、車載式和固定式。用戶終端可提供話音、數據、短信息等業務。用戶終端在頭頂有一顆衛星覆蓋時就可以使用,而一般在用戶的視線范圍內都是有2~4顆衛星。用戶終端可同時和3顆衛星進行通信,并且通過使用分離多徑接收器可以把這些信號合成一個單一的、沒有天電干擾的信號。用戶終端還可以按需要改變功率電平來補償遮擋和干擾的影響,平均功率輸出范圍在50~300 mW之間。衛星不斷移進、移出用戶終端的視線范圍,也不斷無縫隙地淡進和淡出呼叫過程,這種軟切換減少了呼叫受干擾的風險。以上這些先進的數字技術使全球星系統能夠在各種地形環境中提供業務,使信號受到建筑、地形和其他自然景物遮擋的可能性更小。
針對無人機的特點,利用全球星的獨特通信功能,可以設計一個基于全球星的無人機數字通信系統,用以解決新型無人機遠程綜合信息通信問題。
2 系統結構設計
本系統由機載通信設備、地面通信設備、地面監控設備、全球星衛星、網關等組成,如圖1所示。

2.1 全球星系統
全球星衛星和網關作為本系統的衛星通信鏈路,負責轉發系統各種通信信息。
2.2 機載通信設備
機載通信設備安裝于無人機上。機載設備將需要傳輸的數字信息(語音、圖像、數據流、控制命令等)通過USB口或RS 422口傳送給機載通信設備,機載通信設備將信息打包發送至全球星衛星,由全球星衛星轉發到地面通信設備。
機載通信設備主要由ARM與GSPl620等部件組成,如圖2所示。

GSPl620為全球星數傳通信模塊,通過RS 232口與ARM連接,完成通信信息的發送與接收。
ARM為工業控制單片機,通過RS 422口或USB口與機載設備連接。ARM中安裝有通信軟件,完成系統初始化、數據通信、故障診斷等功能。
機載數傳設備的工作流程如下:
ARM啟動后,通過RS 232口發送AT命令對GSPl620進行初始化和撥號連接,同時監測RS 422口或USB口,實時獲取并存儲機載設備發送的通信數據,如果GSP1620撥號連接成功,則將通信數據通過RS232口發送給GSP1620,由GSPl620通過全球星衛星發送給地面通信設備。GSPl 620也負責接收地面通信設備發送的控制指令(例如:飛機爬升、俯沖、轉彎等命令),通過RS 232口傳送給ARM,ARM接收到控制指令后再通過RS 422口或USB口轉發給機載設備。
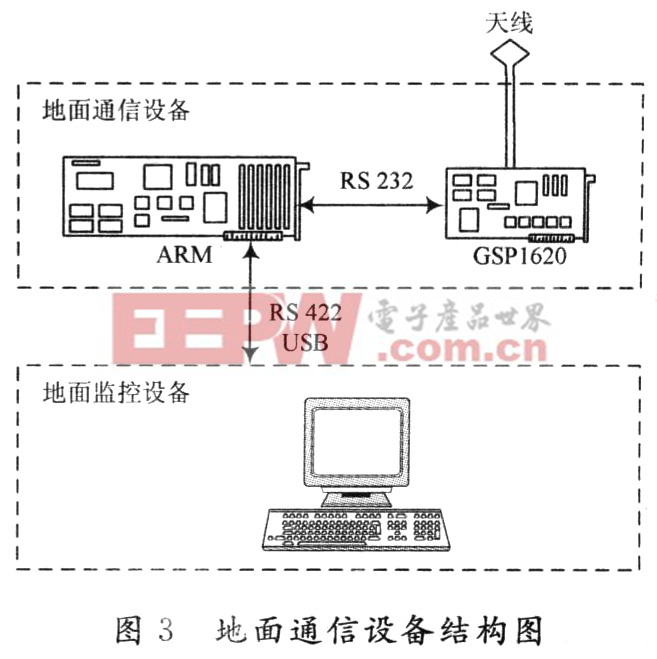
2.3 地面通信設備
地面通信設備與機載通信設備軟硬件通用,只是在使用前初始化時將設備定義為地面通信設備或機載通信設備。地面通信設備安裝在地面監控站內,與地面監控設備通過,RS 422口或USB口連接。地面通信設備將接收到的全球星衛星傳輸的數字信息(語音、圖像、數據流、控制命令等)通過USB口或RS 422口傳送給地面監控設備,同時也可將地面監控設備的控制命令傳送給機載通信設備。
其結構組成與機載通信設備相似,主要由ARM與GSPl620等部件組成。如圖3所示。
地面通信設備的工作流程如下:
ARM啟動后,通過RS 232口發送AT命令對GSP1620進行初始化和撥號連接,連接成功后在GSPl620上實時獲取機載通信設備發送的通信數據,同時通過RS 422轉發給地面監控設備。ARM也負責接收地面監控設備發送的控制指令,通過RS 232口轉發給GSPl620,GSPl620接收到控制指令后發送給機載通信設備。
2.4 地面監控設備
地面監控設備為工業PC機,運行通信監控軟件。地面監控設備通過RS 422口或USB口與地面通信設備連接。完成數據通信、無人機態勢顯示、控制指令上傳、報警、數據管理等功能。
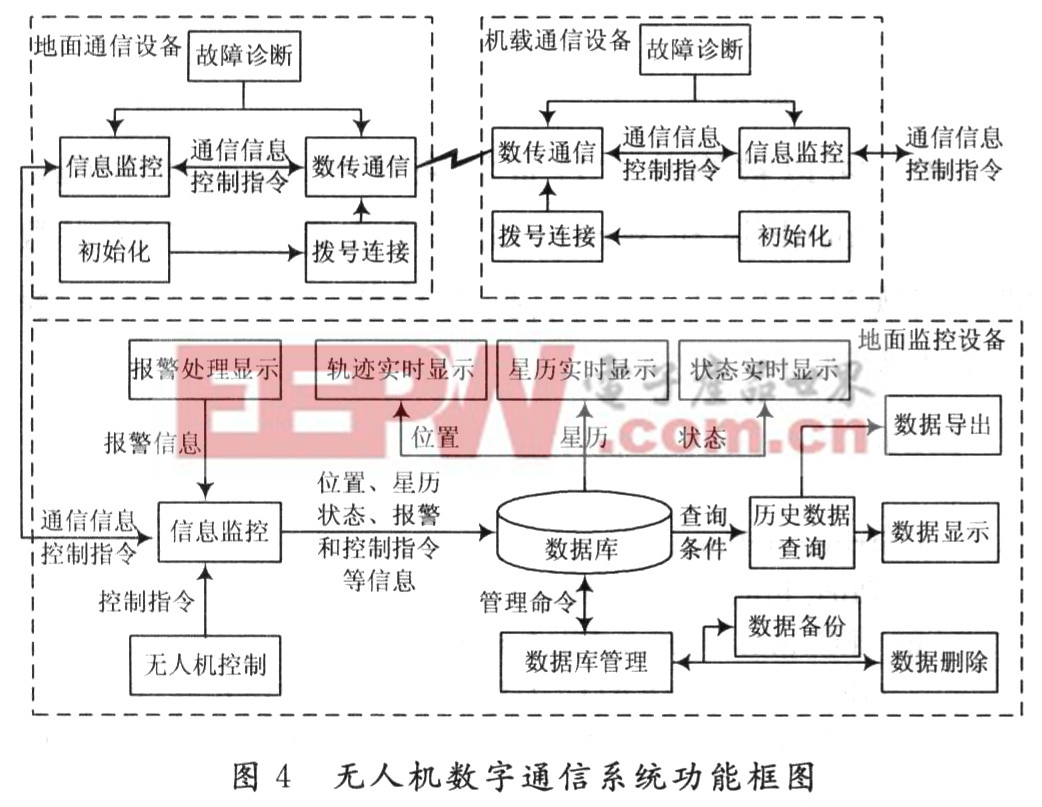
3 系統功能設計
根據目前無人機的使命任務,本系統提供有如下功能:數傳通信功能、監控功能、顯示功能、報警功能、數據管理功能等。按模塊設計的功能框圖和信息傳輸關系,如圖4所示。
3.1 數據通信
數據通信功能主要包括以下幾項內容:數據加密、數據分包、數據分包傳輸、數據接收、數據合包、數據解密等。
3.2 監控功能
監控功能主要包括以下幾項內容:對地面監控設備初始化、系統重置、通信端口管理、生成控制指令、數據存庫等。
3.3 顯示功能
顯示功能主要包括以下幾項內容:地圖背景顯示、鷹眼顯示、地圖基本操作(放大、縮小、漫游、量算等)、無人機飛行狀態(包括軌跡、高度變化、飛行參數等)顯示、全球星星歷狀態顯示等。
3.4 報警功能
報警功能主要包括以下幾項內容:全球星鏈路斷開報警、無人機飛行狀態報警等。報警模式有聲音報警、高亮警示報警等。
3.5 數據管理功能
數據管理功能主要包括以下幾項內容:數據備份、恢復、數據刪除、數據報表查詢、數據顯示、數據打印、數據導出(文本文件、EXCEL 文檔)等。
4 系統軟件設計
4.1 軟件流程
4.1.1 初始化階段
接受飛行任務后,地面監控設備與地面通信設備開機、初始化,地面通信設備接收全球星星歷,發送到地面監控設備,地面監控設備根據星歷判斷衛星信號好壞,給出無人機起飛建議。無人機起飛后,機載通信設備開機、初始化。
4.1.2 建立連接階段
機載數傳設備初始化后與地面數傳設備進行撥號連接,雙方均可進行主叫撥號連接。撥號成功,鏈路建立后,即可進行通信信息傳輸。
4.1.3 通信、監控顯示階段
機載通信設備將來自機載設備的通信信息經全球星發送給地面通信設備,地面通信設備再將該信息轉發給地面監控設備。地面監控設備對信息進行解碼、報警處理、存儲、軌跡顯示、狀態顯示等工作。
4.1.4 連接維護階段
為了保證通信鏈路的暢通,機載通信設備和地面通信設備自動進行衛星通信鏈路的維護,實時監測鏈路狀態,發現鏈路斷開,自動重新撥號連接。同時也負責將鏈路狀態、故障原因實時發送給地面監控設備。









評論