基于SAR系統的無人機定位導航系統的設計

引言
本文引用地址:http://www.czjhyjcfj.com/article/155684.htm無人飛機與載人飛機相比,它具有體積小、造價低、使用方便、對作戰環境要求低、戰場生存能力較強等優點,備受世界各國軍隊的青睞。無人駕駛飛機以其準確、高效和靈便的偵察、干擾、欺騙、搜索、校射及在非正規條件下作戰等多種作戰能力,發揮著顯著的作用,并引發了層出不窮的軍事學術、裝備技術等相關問題的研究。
高空長航時無人機的飛行高度利于觀測星體,為此,考慮在慣性/SAR 組合基礎上,采用慣性導航和星光組合,可以為SAR 成像提供高精度的姿態信息,提高SAR 成像質量。
本文以長航高空無人機成像期間對導航高精度要求為應用背景,開展了基于SAR 輔助的慣導/星光組合導航研究,結合SAR 工作的非連續特性,設計了SAR/慣導/星光組合導航定位方案,提出了非同步輸出多傳感器異步集中卡爾曼濾波算法,可有效提高導航定位系統的自主性和精度。
1 卡爾曼濾波器設計
設位移 s 時,飛機的位置坐標為X (s),對于不同的位移值,均有一個X (s)值與之對應,當取樣位移不間斷變化時,就得到位置坐標序列{X (s),X(s+1)……},飛機位置預測序列{X (s+1),X(s+2)……},該序列是系統噪聲等驅動的一階遞歸模型,在x 軸方向推導狀態方程如下:

測量方程如下:

Zx (s)為s位移時飛機坐標x軸向的測量值。
H 為測量參數,它是由測量系統和測量方法所確定,不隨位移變化的一個常數,因為是單模型,取為1,V(s)為測量噪聲。
均方估計誤差為Px (s+1) = E[Xx (s +1) — Xx (s)]2,在均方估計誤差為最小的準則下,通過數學推導,即可得出飛機自動控制的卡爾曼濾波公式,如下:
預估計方程:

計算卡爾曼濾波增益,得:

均方預測誤差方程:

同理,可以推導y,z 軸向的狀態方程,則飛機位置的狀態方程如下:
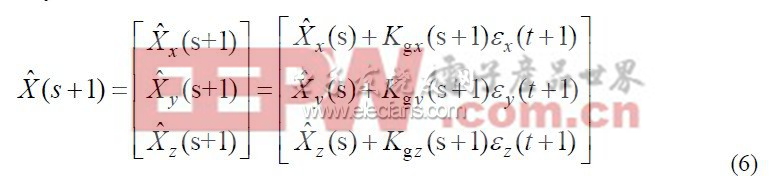
卡爾曼濾波是以預測加修正來實現濾波遞推的,其這個性質,很容易通過計算機仿真實現,從而可以完成對飛機位置的預測,預估計方程:

同時,與地面基站雷達測量值進行比對,調飛機因為機械振動等原因造成的位移偏差,其濾波模型為:
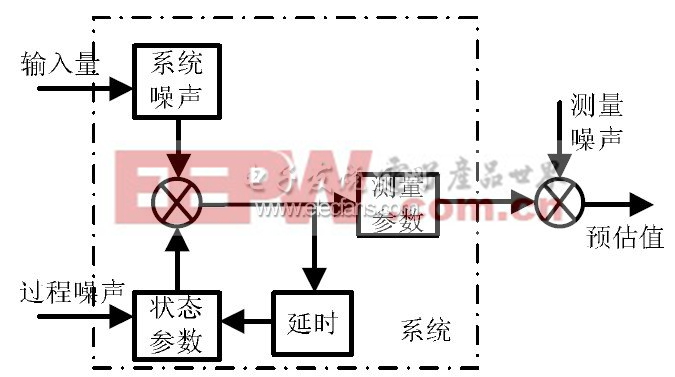
圖 1 卡爾曼濾波的系統模型框圖









評論