ARM+PCL6045B的嵌入式運動控制器設計

①系統初始化:進行微處理器的硬件初始化,包括輸入/輸出接口的配置、具體總線通信方式的配置以及伺服系統相關的接口參數配置。
②通信模塊:負責運動控制卡和上位機之間的坐標值、速度值、數控系統的I/O接口狀態、報警狀態以及數據鏈表的傳輸。
實時域建立在RTAI實時內核的基礎上。其實時任務通過實時進程的方式來完成,一種為周期性(peri_odic)實時進程,另一種為一次性(one shot)實時進程。實時域主要包括如下4個周期性實時線程:
①狀態檢測線程(rt_monitor_thread)。本任務對設備運行狀態進行檢測,負責從I/O端口讀入各個連接的I/O設備值,然后將狀態寫入狀態檢測緩沖區中,對設備急停、伺服報警、限位信號進行判斷,并進行相應的處理。
②插補線程(rt_interpolation_thread)。從譯碼緩沖區中順序取得插補數據,然后根據是直線或者圓弧進行插補,插補得到下個周期應該到達的理論坐標值。
③位置控制線程(rt_position_thread)。讀取計數器中編碼器的數值,得到實際的位置,并與插補器中的理論位置坐標作比較。根據差值調節PID參數,并將具體脈沖輸出數寫入對應的PWM口的脈沖數寄存器中。
④功能控制線程(rt_function_thread)。功能控制任務利用RTAI實時管道來傳遞命令和狀態信息的功能。通過管道的命令設置實現Linux操作系統對實時部分RTAI的訪問,從而實現運動控制器的運行、暫停、給定速度等狀態設置。
2.1 軟件平臺的建立
軟件平臺是系統應用程序開發的基礎。本系統軟件平臺主要包括:ARM-Linux的移植、串行接口驅動開發、USB接口驅動開發、LCD接口驅動開發、觸摸屏接口驅動開發、以太網接口驅動開發、文件系統的移植等。這些軟件的開發和移植在很多文獻中有詳細的說明。
2.2 運動控制函數庫的設計
通用運動控制器的功能主要取決于運動控制函數庫。要做成一個開放式的運動控制器,必須編寫豐富的運動控制函數庫,以滿足不同的應用要求。運動控制函數庫要為單軸及多軸的步進或伺服控制提供許多運動函數,如單軸驅動、兩軸直線插補、3軸直線插補、圓弧插補等等。另外,為了配合運動控制系統的開發,還編寫了一些輔助函數,如中斷處理、編碼器反饋、間隙補償、通用開關量的輸入輸出等。這樣,用戶在開發應用程序時就不必再關心底層的東西,只需根據控制系統的要求編制人機界面,并調用運動控制函數庫中的函數,就可以開發出滿足要求的多軸運動控制系統。
2.3 對Ljnux進行實時化改造
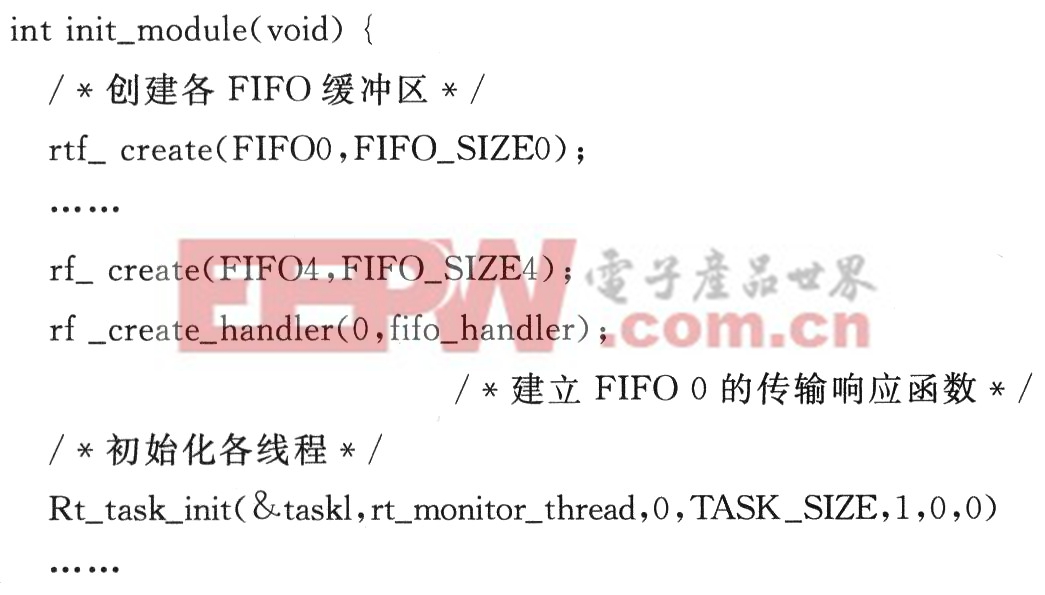
由于Linux不是一個實時操作系統,所以,利用實時內核補丁RTAI(Real Time Application Interface)。RTAI的安裝和使用詳見參考文獻[7]。該控制器所使用的Linux開發環境為ELDK(Embedded Linux DevelopedKit)3.0。Linux內核為Linuxp pc_2_4_devel,而RTAI的版本為24.1.12。由Linux中的init_module()和cleanup_modtde()兩個函數加載和卸載實時任務模塊,通過這兩個函數進行實時線程及其處理函數的創建和回收。其關鍵程序如下:本文引用地址:http://www.czjhyjcfj.com/article/152322.htm

2.4 應用軟件設計
應用軟件主要包括人機交互界面的設計、數控指令的編譯解釋、按鍵功能的實現、運動狀態的監視等。通過操作系統ARM-Linux,可方便地實現上述功能,并進行多任務的調度。運動控制器根據輸入的數控指令文件,將其存入NAND Flash中。ARM處理器通過對數控指令進行譯碼、速度預處理、粗插補計算等,調用運動控制函數,進而發出控制指令控制步進或伺服系統去控制執行部件進行動作,從而達到實現運動控制的目的。
結 語
本文綜合應用ARM嵌入式系統技術、DSP運動控制技術等多種技術開發出高性能的嵌入式運動控制器。該控制器相比傳統的基于PC機的運動控制器,具有成本低、體積小、功耗低、功能豐富、運行穩定的特點和優勢。以ARM微控器和PCL6045B為核心的嵌入式運動控制器,采用Linux操作系統,經過對其進行實時化改造,使系統能很好地進行多任務處理,保證了系統的實時性。該控制器能夠實現高速和高精度的運動控制需求,具有良好的運動控制性能。該運動控制器的設計,為讀者提供了一種良好的解決方案,在運動控制領域具有廣闊的應用前景。

pid控制器相關文章:pid控制器原理





評論