FPGA的時鐘頻率同步設計

引 言
網絡化運動控制是未來運動控制的發展趨勢,隨著高速加工技術的發展,對網絡節點間的時間同步精度提出了更高的要求。如造紙機械,運行速度為1 500~1 800m/min,同步運行的電機之間1μs的時間同步誤差將造成30 μm的運動誤差。高速加工中心中加工速度為120 m/min時,伺服電機之間1μs的時間同步誤差,將造成2 μm的加工誤差,影響了加工精度的提高。
分布式網絡中節點的時鐘通常是采用晶振+計數器的方式來實現,由于晶振本身的精度以及穩定性問題,造成了時間運行的誤差。時鐘同步通常是選定一個節點時鐘作為主時鐘,其他節點時鐘作為從時鐘。主節點周期性地通過報文將主時鐘時間發送給從節點,從節點接收到報文后,以主時鐘為基準進行延遲補償,然后將計算出的新時鐘值賦給從時鐘。這種同步方法造成了從時鐘計數值的不連續,即會出現重復(從時鐘晶振頻率快于主時鐘)或跳躍(從時鐘晶振頻率慢于主時鐘),而且這種方法并沒有從根本上解決時鐘頻率的不同步問題,因此要進一步提高同步精度很困難。本文研究了一種可對頻率進行動態調整的時鐘,通過對時鐘頻率的動態修正,實現主從時鐘頻率的同步,進而實現時間同步。
1 時鐘同步原理
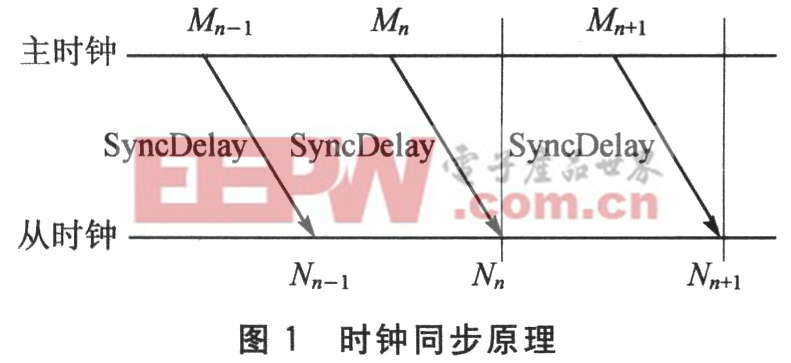
要實現兩個時鐘的同步,一是時鐘的計數值要相同,二是計數增長速率要相同。如圖1所示,設主時鐘的頻率為f,從時鐘頻率在Nn-1到Nn時間段為fn-1,在Nn到Nn+1為fn,SyncDelay為同步報文從主站到從站的延遲時間,可以通過延時測量幀采用往返法測量得到,從時鐘要在Nn+1時刻達到與主時鐘相等,那么有: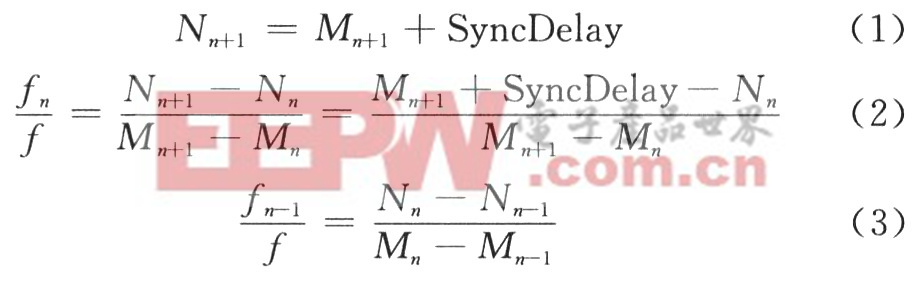
因為主時鐘是周期性發出同步報文,所以有Mn+1-Mn=Mn-Mn-1=T,由式(2)和(3)可得:
kn就是時鐘頻率調整系數。在每個同步周期可以計算出頻率調整系數,然后通過相應的硬件電路來實現頻率調節。
2 可調頻率的時鐘設計
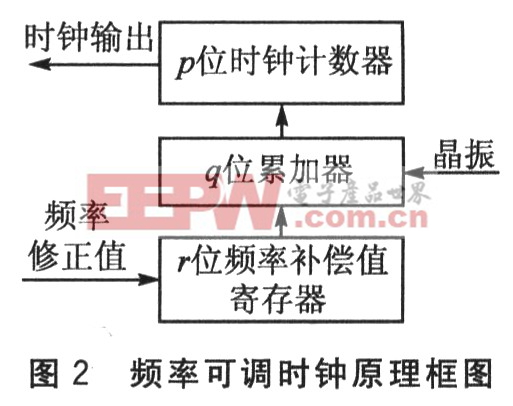
可調頻率時鐘是一種完全由數字電路組成的時鐘計數器,構造簡單,可以很方便地在FPGA中實現,原理如圖2所示。該頻率可調時鐘由一個戶位時鐘計數器,q位累加器和r位頻率補償值寄存器組成。每個晶振周期,累加器與頻率補償寄存器中的FreqCompValue相加,并將結果保存到累加器。如果累加器發生溢出,時鐘計數器的值就增加1;反之,時鐘計數器保持不變。由此可以看出,晶振頻率和頻率補償值FreqCompValue的大小決定了累加器的溢出速率,也決定了時鐘計數器的計數頻率。所以可以通過調整FreqCompValue來調節時鐘頻率。為了實現高精度時鐘,晶振頻率要比時鐘頻率高。設晶振頻率為FreqOsc,時鐘計數頻率為FreqClk,分頻比為DivRatio,同步周期為SyncInterval,補償精度為Precision,p、q、r可由下列公式得出:
DivRatio=FreqOsc/FreqClk (5)

在本系統中,取FreqClk為50 MHz,FreqOsc為60MHz,則DivRatio為1.2。當同步周期為1 s時,補償精度Precision可選10-9,由公式可選擇r=q=32,p=64。頻率補償初值由下式求出:
FreqCompValue=2q/DivRatio=232/1.2=32d3579139413
在時鐘輸出算法中,該值由頻率調整系數動態調整:
FreqCompValuen=kn?FreqCompValuen-1 (10)

伺服電機相關文章:伺服電機工作原理











評論