嵌入式電梯群控系統設計

在總線中傳送的報文,每幀由7部分組成,CAN協議支持2種報文格式,其唯一的不同是標識符(ID)長度不同,標準格式為11 bit,擴展格式為29 bit[4]。標準格式幀的組成如圖2所示 。本文引用地址:http://www.czjhyjcfj.com/article/151742.htm
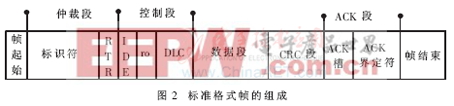
在標準格式中,報文的起始位稱為幀起始(SOF),然后是由11 bit標識符和遠程發送請求位(RTR)組成的仲裁段。RTR位標明是數據幀還是請求幀,在請求幀中沒有數據字節。
控制段包括標識符擴展位(IDE),指出是標準格式還是擴展格式。它還包括1個保留位 (ro),為將來擴展使用。它的最后4個字節用來指明數據段中數據的長度(DLC)。數據段范圍為0~8個字節,其后有一個檢測數據錯誤的循環冗余檢查CRC段。
ACK段用來確認是否正常接收,由ACK槽(ACK Slot)和ACK界定符2個位構成。發送站發送的這兩位均為隱性電平(邏輯1),這時正確接收報文的接收站發送主控電平(邏輯0)覆蓋它。用這種方法,發送站可以保證網絡中至少有一個站能正確接收到報文。
報文的尾部由幀結束標出。在相鄰的兩條報文間有一很短的間隔位,如果這時沒有站進行總線存取,總線將處于空閑狀態。
2.2.3 通信協議設計
由于在CAN總線中,標識符(ID)的大小規定了各節點發送消息的優先級,ID號越小,發送優先級越高,本系統中規定群控主控制器優先級最高,因此設為0x01,其他電梯主控制器次之,設為0x11,依次類推。
本系統消息格式采用:目的ID號+命令+數據字節1+數據字節2+……+數據字節6的格式,在LPC2368中,存放數據的寄存器是CANRDA、CANRDB,每個寄存器是4個字節,因此一條CAN消息最多可存放8個字節。本協議中,CANRDA對應目的ID號、命令、數據字節1、數據字節2;CANRDB對應數據字節3~6。
目的ID號確定消息的發出源,當目的ID號的內容為0x00時,所對應的消息是一條由主控制器發出的廣播消息,各節點均接收并分析。
命令字節的內容是協議的核心,由各命令組成,包括狀態命令、控制命令,通常與數據字節搭配使用。
2.2.4 通信軟件設計
通信模塊軟件設計,首先要初始化CAN控制器,CAN控制器初始化主要實現CAN工作時的參數設置,這些初始化的內容包括:硬件使能CAN、設置CAN報警界限、設置總線波特率、設置中斷工作方式、設置CAN驗收過濾器的工作方式、設置CAN控制器的工作模式等。初始化結束之后CAN模塊就可以進入工作狀態,進行數據發送和接收。發送數據時,首先判斷發送緩沖區是否空閑,如果有空閑發送緩沖區則將發送數據寫入該發送緩沖區內,再啟動發送命令,完成一幀數據的發送。接收數據時,讀取接收緩沖區數據,同時釋放該接收緩沖區,完成一幀數據的接收。數據發送和接收流程如圖3所示。

3 其他模塊設計
3.1 液晶顯示模塊
液晶顯示模塊選用容量為2行16個字的液晶模塊,每個字以5×8點陣塊組成。本設計中群控主機對各電梯進行監控,通過液晶顯示模塊可以實時顯示各個電梯的狀態,包括各電梯的群控狀態、樓層狀態、運行方向,同時對群控主機的各種參數設置也可以很清楚地在液晶模塊上顯示出來。
3.2 鍵盤模塊
鍵盤模塊采用了5個按鍵實現對群控參數、模式的設置,這5個按鍵分別對應為:ESC、UP、DOWN、ROTA、ENT,各按鍵作用如下:ESC為返回鍵,返回主顯示界面;UP為上翻頁鍵,該按鍵可實現循環上選擇菜單。在參數設置中,實現數字循環+1,并實現ON/OFF、YES/NO、HIGH/LOW之間的切換。DOWN為下翻頁鍵,該按鍵可實現循環下翻頁選擇菜單。在參數設置中,實現數字循環-1,并實現ON/OFF、YES/NO、HIGH/LOW之間的切換。ROTA為右方向鍵,該按鍵可循環右移。在參數設置中,實現光標移位。ENT為確認鍵,在選中某菜單(即菜單在LCD上反白顯示)后,按Enter鍵進入菜單,執行相應功能。
4 群控算法設計
4.1 模糊控制概念
模糊控制是建立在模糊集合論基礎上的一種語言規則與模糊推理的控制理論,它將自然語言轉化為計算機所能接受的算法語言,并模擬人的思維方法,對被控過程進行有效的確定性的控制,它利用專家知識獲得各種控制規則,可以很好地處理電梯系統的多目標性、隨機性和非線性[5]。所以本系統采用模糊控制理論來處理群控中電梯的調度問題。
4.2 群控模糊算法設計
為了有效地調度電梯來滿足乘梯者的要求,提高乘客的舒適度和總體服務質量,在電梯群控研究和應用過程中,常常把減少乘客的平均候梯時間(AWT)、平均乘梯時間(ART)及能源消耗(RPC)作為評價標準,因此在算法設計上通過模糊控制調整各評價因素(候梯時間、乘梯時間、能量消耗等)的權重系數,從而確定最佳派梯方案,進而實現電梯群控的高效性[6]。
本系統將AWT、ART及RPC作為電梯群控的優化參數和評價標準,通過一個調度算法判斷出哪部電梯來響應各廳層召喚。所以構造一個評價函數,綜合以上評價標準,評價函數如式(1)所示:







評論