語音識別在微機器人控制系統中的應用

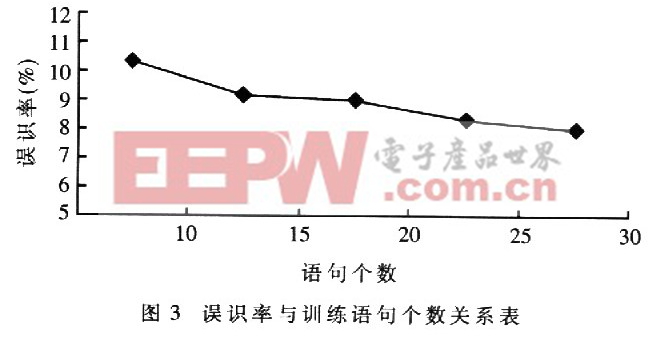
由圖3可以看出,由于本系統實時學習的特點,系統的識別率隨著訓練數據的增加而逐步上升(誤識率下降)。但是當實驗數據繼續增多時,系統的識別率和實時性都有下降趨勢。這是由于系統處于無人監管狀態,根據判斷結果進行參數重估。如果判斷結果錯誤,勢必將錯誤帶人參數重估步驟中。
逐步增加高斯混合度數目,可以得到圖4的實驗結果。可見高斯混合度在18的時候達到較好的識別效果,混合度太高識別率反而會有所下降,這是由于嵌入式系統的資源有限,運算復雜度的增長超過了嵌入式設備的限制所造成的。

為了使微機器人能夠正確地執行人的聲音指令,本文將語音識別的過程嵌入微機器人的控制系統中,根據微機器人控制系統資源有限、對實時性要求高的特點,使用增量K均值分段HMM的算法,簡化計算節省了所需的硬件資源,實現了實時學習的語音識別,能方便地對微機器人進行控制。
本系統的識別率達到了較高的標準,又由于加入了智能化的用戶選擇部分,用戶可隨時選擇學習新的語句,使其有更廣闊的應用前景。
由于嵌入式平臺受到處理速度、存儲空間的限制,所以能夠對微機器人發出的指令十分有限,識別率還有待提高。因此,研究語音識別算法,比較各種算法的優缺點,進而在嵌入式微機器人控制系統上實現大詞匯量非特定人的語音識別,實現真正意義上的人機交流是今后進一步的工作。











評論