基于DSP三伺服包裝機電子凸輪控制系統的研究與應用

1 引言
凸輪機構廣泛應用在各種自動機械和自動控制裝置中,它能將旋轉運動轉換為預期的間歇直線往復運動或往復擺動等。從理論上講,只要適當的設計出凸輪的輪廓曲 線, 就可以使推桿得到各種預期的運動規律,而且結構簡單緊湊。但凸輪機構在實際應用中也存在著很多局限性:
(1)凸輪機構屬于高副點線接觸,存在較大的接觸應力,無法傳遞較大的功率;加之凸輪在工作過程中高速運行,所以凸輪磨損快,長時間使用會使從動件的運動失真,因而不能用在那些有高的重復精度要求的場合。
(2)一個凸輪只能實現一種預定的運動規律, 輸出運動缺乏柔性,當從動件運動規律改變時,凸輪的生產工藝就需要重新調整或徹底更換[1]。
(3)機械結構復雜,對機械安裝人員的要求高,生產成本高,維修調試不方便。
(4)凸輪機構傳動過程中存在較大噪音。
2 電子凸輪含義及優點
2.1電子凸輪含義
隨著科技進步和數字伺服技術的出現,在傳動及控制系統中我們可以利用電子凸輪代替傳統的機械凸輪實現各種復雜的往復運動。電子凸輪是以伺服控制技術為基礎,并結合先進的微處理器,通過數字化系統實現模擬機械凸輪的功能[2]。
2.2電子凸輪的優點
(1)電子凸輪系統沒有機械凸輪的慣性力、彈性變形、剛性沖擊等因素,故響應速度快,能適合高速運動的傳動裝置。
(2)電子凸輪不存在磨損, 凸輪曲線形狀不會改變, 因而從動件重復實現預期運動的精度高、穩定性好[3]。
(3)可以方便的更改運動曲線,只要更改相應的運動參數就可以實現不同的運動曲線,大大降低生產安裝成本。
(4)傳動平穩,機械振動小,噪音低。
3 基于DSP的電子凸輪控制系統
本文中使用Motorola DSP(Digital Singal Processing 數字信號處理) 56F807芯片為處理器協調伺服驅動器和伺服電機實現電子凸輪的控制系統設計;此DSP芯片在80MHz時鐘頻率下,每秒可處理40×106 條指令,有定時器模塊、相位檢測模塊、PWM輸出等功能模塊,并具有豐富的外圍接口,足夠滿足電子凸輪的各種曲線需求。
3.1電子凸輪的DSP控制
本文的電子凸輪是通過DSP的相位檢測模塊不斷讀取主軸伺服電機的位置,根據主軸位置計算出從軸相對應的速度和位置實現主從軸凸輪曲線對應關系。伺服電機 的功能是將電脈沖信號變換成相應的角位移,即給1個電脈沖信號,電機將轉過1個固定的角度(可通過設置伺服電機軸分辨率來實現固定角度)。由于伺服電機的 角位移與輸入脈沖成比例,調整DSP發出的電脈沖頻率,就可以對伺服電機進行調速[4]。
3.2電子凸輪的實現步驟
(1)確定主從軸的速度曲線對應關系。
(2)將一個周期內從動軸的位移分段,根據主從軸速度曲線對應關系確定每段位移內從軸的速度。
(3)將每段位移量轉化為伺服電機的脈沖數。
(4)根據從軸的速度要求計算出DSP所需要的電脈沖頻率。
(5)將上面計算得到的電脈沖頻率作為DSP的PWM模塊的模值輸出即可控制伺服電機的轉速,實現電子凸輪功能。
4 基于DSP的電子凸輪控制系統的應用
本文以三伺服自動包裝機為例介紹基于DSP的電子凸輪的具體應用。如圖1所示為新型三伺服自動包裝機工作原理圖。
從圖中看到,該機橫封切斷輥刀、包裝膜軸和卸料傳送帶、送料撥叉軸分別由單獨的伺服電機作為動力該機集自動送料、包裝物品、封口、切斷于一體,是一種高效 率的連續式的包裝機。其控制的重點和難點在于三軸的位置及速度同步以及凸輪運動的實現。位置同步是:橫封的切割點必須在塑料膜的色標點內,且保證橫封不能 切到物料;速度同步:是橫封刀切割時的速度與此時塑料膜的速度以及物料速度要相等;凸輪運動是:由于包裝的袋長在一定范圍內是可變的,橫封刀旋轉1周所經 過的距離一般不等于袋長,這就要求橫封在一定時間內要完成由同步速度到變速再到同步速度的凸輪運動過程。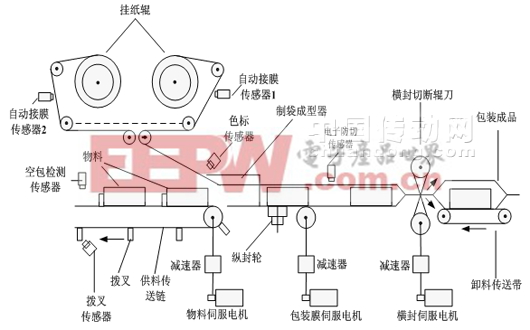
圖1三伺服自動包裝機工作原理圖
以包裝膜軸為主軸,橫封刀軸為從軸,它們的速度曲線根據袋長與橫封刀的周長有三種關系:
(1)橫封刀周長大于一個袋長
(2)橫封刀周長小于一個袋長
(3)橫封刀周長等于于一個袋長
下面以橫封刀周長大于一個袋長為例進行計算。橫封刀周長大于一個袋長的
速度曲線如圖2:其中t1與t2之間為速度同步段;t3為橫封刀切割時刻。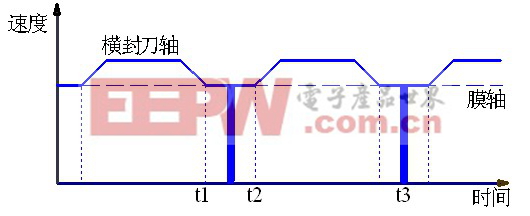
圖2 橫封刀周長大于一個袋長時速度時間圖
將上面計算得到的電脈沖頻率作為DSP的PWM模塊的模值,通過控制模值數來對伺服電機進行調速,實現橫封刀軸與膜軸的速度曲線。
5結束語
本文介紹了基于DSP的電子凸輪控制系統及其實現方法,以三伺服自動包裝機為例說明電子凸輪算法的具體實現。三伺服自動包裝機控制系統使用電子凸輪后有一下優勢:
(1)使包裝機的機械結構大大簡化,傳動部分直接鏈條或同步帶傳動,省
去了機械凸輪結構,減輕機器的重量,減小機裝部分。
(2)刀膜速度比例可以用電子比例方式設定,以滿足不同需要。
(3)可以實現防空包、防切料、不停機功能。
(4)包裝機的操作更方便,用戶只需設定袋長、切斷偏移位置和停刀角度就可以起動調速運行。
參考文獻
[1]王程,賀煒.基于單片機的電子凸輪系統研究[J].機械設計與制造,2006(11): 4-6.
[2]張閣,鄒蕙君,姚燕安,郭為忠.電子凸輪的概念與設計[J].機械設計與研究,2000年增刊 89-91.
[3]王安敏,鹿虎基于C8051 單片機的電子凸輪實現[J].機械傳動,2010(10):85-87.
[4]于鐳,常軍,黃存柱.基于DSP的自動裝機控制系統的軟件設計[J].微型計算機與應用,2010,(1).
作者簡介:
于鐳(1969-),男,漢,副教授,青島科技大學,碩士生導師,研究方向為視覺機器人,數字伺服系統
衛光(1983-),男,漢,青島科技大學,碩士研究生,研究方向為運動控制系統,智能控制
Brief introduction of the author :
Yu Lei(1969-),male, Han nationality, Qingdao University of Science and Technology ,master tutor, working in vision robot , figure servo system
Wei Guang(1983-),male, Han nationality, Qingdao University of Science and Technology ,the master graduate student , working in motion control system, intelligence control

伺服電機相關文章:伺服電機工作原理










評論