用感應器對BLDC電動機進行磁場定向控制

電動機可分為三大類,分別是AC、DC和通用型。顧名思義,AC電動機使用AC電源運行,而DC電動機則使用DC電源運行。通用型電動機可同時支持AC和DC電源。AC電動機包括AC感應電動機和鼠籠式電動機,其還可進一步細分為單相和多相電動機。而DC電動機則包括有刷DC電動機、無刷DC電動機(BLDC)和步進電動機。
本文引用地址:http://www.czjhyjcfj.com/article/116807.htm現有的電動機控制/驅動技術:
相對于AC電動機驅動而言,DC電動機驅動比較易于實施。DC電動機可直接通過電壓—頻率(V/F)驅動;即應用電壓越高,頻率或速度就越高。這種驅動通常實施于有刷DC電動機。
就AC電動機驅動和某些控制器將應用DC轉化為AC來驅動電動機的設備(如BLDC或PMSM)而言,我們要采用復雜的驅動算法順序改變線圈電流方向,從而實現所需的轉動方向。線圈轉動的速度同電動機的運行速度成正比。我們可使用以下不同的算法:
梯形控制:也稱作六步控制法。這是一種最簡單的算法。這六個轉換步驟中的每一步都會在一對線圈之間形成電流路徑,讓第三個線圈斷連。這種辦法會產生較高轉矩波動,導致震動和噪聲,相對于其他算法的性能而言比較差。
正弦控制:也稱作電壓超頻整流。通過對3個線圈平穩提供(正弦)可變電流,正弦控制能解決梯形控制涉及的很多問題,從而降低轉矩波動,實現平穩的轉動。時變電流可用基本PI調節器進行控制,不過這在較高速率情況下會導致性能降低。
磁場定向控制(FOC):也稱作矢量控制法。FOC相對于正弦控制而言能在更高速率情況下提高效率。此外,這種方法即便在瞬態操作期間也能確保效率優化,完美保持定子和轉子的流量。相對于其他所有技術而言,FOC還能就動態負載變化提供更好的性能。
什么是磁場定向控制?
磁場定向控制是變頻驅動或變速驅動領域使用的一種方法,可通過控制電流來控制三相AC電動機的扭矩(進而控制速度)。利用FOC技術,我們能獨立控制扭矩和流量。FOC法可加快動態響應速度,超出洗衣機等應用的要求。該方法還可避免轉矩波動問題,無論速度高低FOC法都能實現更加平滑準確的電動機控制。
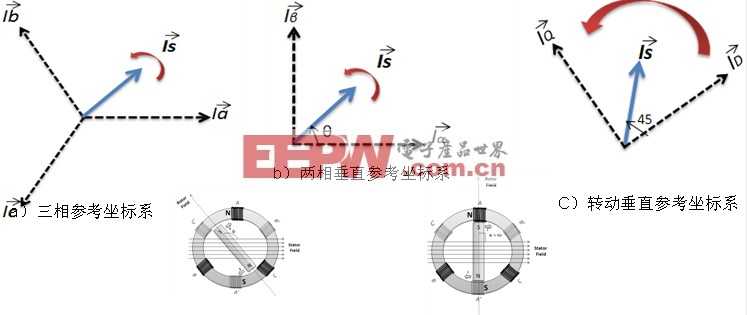
當定子和轉子的磁場垂直時,感應電動機的扭矩最大。就FOC而言,我們檢測并調節定子電流,從而讓轉子和定子流量之間的角度為 90度,以實現最大扭矩(如下圖所示):
FOC工作在三相電流的合成矢量上,而不是分別獨立控制每一個相。AC感應電動機的控制變量通過數學轉換固定(DC)。這樣,FOC就能和處理固定參數一樣,通過模仿DC電動機的工作來控制電感電動機。
FOC使用的方法有兩種。一種是直接FOC,轉子流量角度直接通過流量估算或測量進行計算。另一種是間接FOC,轉子流量角度間接通過可用速度和滑移計算得出。
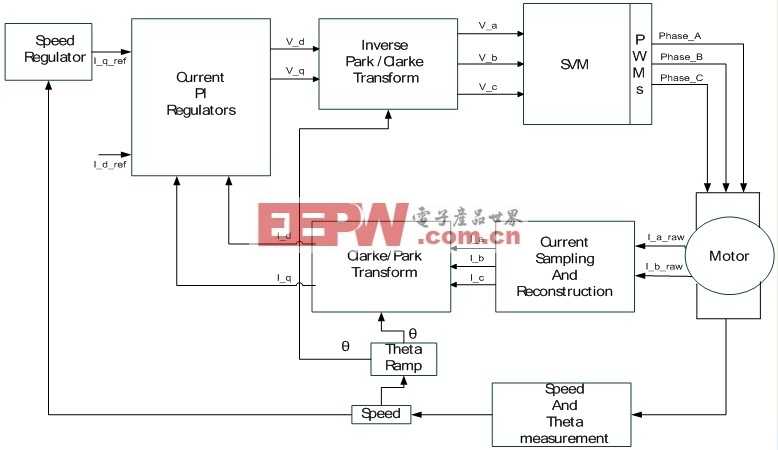
涉及感應器FOC的步驟如下:
Ia + Ib + Ic = 0
第一步:
檢測三個定子相電流中的兩個,第三個電流則用Kirchoff電流關系確定:
Ia + Ib + Ic = 0
其中,Ia、Ib和Ic為相電流。
(Ia, Ib, Ic) ![]() (Iα, Iβ)
(Iα, Iβ)
第二步:
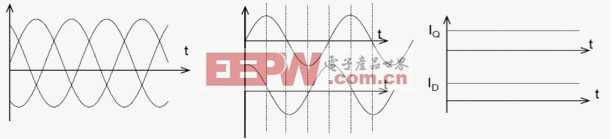
三個相電流從定子三軸系統通過克拉克轉換變為雙軸坐標系統:
(Ia, Ib, Ic) ![]() (Iα, Iβ)
(Iα, Iβ)
其中,Iα和β是轉化為雙軸坐標系統的定子電流。
(Iα, Iβ)![]() (Id, Iq)
(Id, Iq)
第三步:
有關元素和雙軸定子電流本身具有時變屬性,用傳統的PI跟蹤相當復雜。因此,我們根據轉子位置(通過感應器或back EMF確定)讓固定參考變為轉動參考,其中軸元素保持常量,這樣就能用傳統PI控制器來抵消誤差。轉動通過帕克轉換完成:
其中,Id和Iq從轉子角度而言是相內和正交相定子電流。
第四步:
一旦矢量失去時變性,我們就能比較相應的軸矢量和參考,并就每個軸用PI控制器(見以下方程式)來確定誤差校正信號。Id參考控制轉子磁化通量。Iq參考則控制電動機的扭矩輸出。
第五步:
PI控制器的相應輸出隨后可通過逆變帕克和克拉克轉換傳遞,轉變回3相定子參考。
第六步:
生成3相參考信號后,我們再用空間矢量調制(SVM)來調制PWM。

電動機相關文章:電動機工作原理設計
霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理 矢量控制相關文章:矢量控制原理




評論