重型汽車抑制干擾源的技術(shù)措施

硬件實(shí)現(xiàn)原理
本文引用地址:http://www.czjhyjcfj.com/article/104868.htm按照競賽的某些規(guī)定,本文設(shè)計(jì)了如圖1所示的硬件原理框圖。紅外傳感器采用一排13對(duì)紅外發(fā)射接收管,利用其接收的電平大小經(jīng)過MCU的ADC后由MCU判斷當(dāng)前黑線所處的位置,為了降低功耗,系統(tǒng)中還增加了MOS開關(guān)管,當(dāng)檢測某紅外傳感器時(shí)該傳感器供電打開,其余的則關(guān)閉。賽道中具有十字交叉路口,同時(shí)必須判斷起始(即終止線),因此智能車預(yù)先可以配置當(dāng)前賽道的總的十字交叉?zhèn)€數(shù),同時(shí)通過軟件算法可以判斷出是否經(jīng)過世紀(jì)交叉口(起始終止線可以作為一個(gè)十字交叉線)。系統(tǒng)運(yùn)行時(shí),按照紅外傳感器采集的信息可以判斷出當(dāng)前引導(dǎo)線的位置,即在小車的左邊、中間或右邊,偏離多少,MCU據(jù)此以及由Hall測速傳感器獲知的當(dāng)前小車的速度確定小車當(dāng)前的行為,主要控制舵機(jī)即小車的方向和電機(jī)即小車的速度。
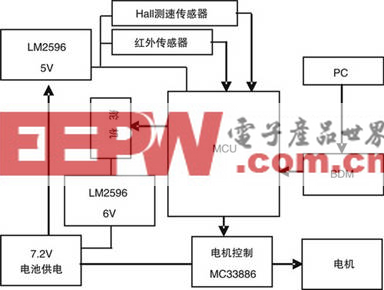
圖1 系統(tǒng)硬件框圖
軟件控制算法
系統(tǒng)軟件控制主要包括兩部分,也即記憶算法的兩個(gè)過程,從行駛過程中看即第一圈和第二圈,其流程框圖如圖2所示。
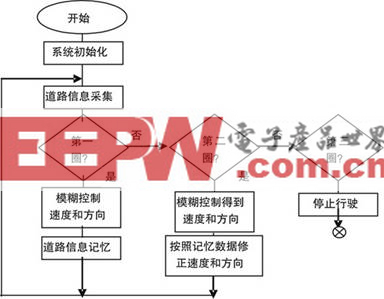
圖2 系統(tǒng)軟件控制流程圖
初圈的控制和記憶
智能車在行使第一圈時(shí)的主要目的就是記憶賽道信息特征,并進(jìn)行一定的處理。按常規(guī)方法小車需要?jiǎng)蛩傩旭偅员阍诠潭ǖ臅r(shí)間間隔或固定的路程間隔記憶相關(guān)的道路信息。數(shù)據(jù)記憶時(shí),采用了12個(gè)磁鋼的霍爾傳感器,車輪轉(zhuǎn)一圈得到12個(gè)計(jì)數(shù),即使在速度很快的情況下響應(yīng)時(shí)間也是us級(jí)的,精度足夠滿足要求。

霍爾傳感器相關(guān)文章:霍爾傳感器工作原理
霍爾傳感器相關(guān)文章:霍爾傳感器原理

評(píng)論