基于LIN總線汽車前燈運動控制系統的設計

LIN收發器
本文引用地址:http://www.czjhyjcfj.com/article/101025.htm本設計選用TJAl020作為LIN收發器,TJAl020是LIN主/從協議控制器和LIN物理總線之間的接口,主要用作于車輛副網絡。其波特率為2.4~20kbit/s。控制器在TXD引腳輸入的發送數據流通過LIN收發器轉換成LIN總線信號,并由收發器控制轉換速率和波形,減少極低的電磁發射(EME)。 LIN總線的輸出引腳通過一個內部終端電阻拉成高電平。收發器在LIN總線的輸入引腳檢測數據流并通過引腳RXD發送到微控制器。
電源模塊
在設計中,LIN模塊的電壓調節器均采用微功耗、低壓差穩壓器LTll2l-5。選用 LTl121-5通過對SHDN輸入低電平,能使其進入停止模式,這時靜態電流只有16mA,因此在總線上沒有活動時,就能達到減少功耗的目的;此外,該器件還具有防止輸入和輸出電源反向的功能,即使在輸出端不增加二極管的情況下,也能防止電流反向倒流。
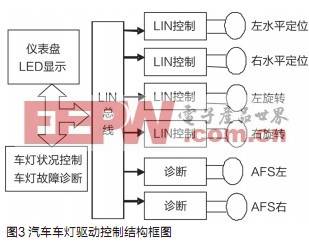
車燈的驅動電路模塊
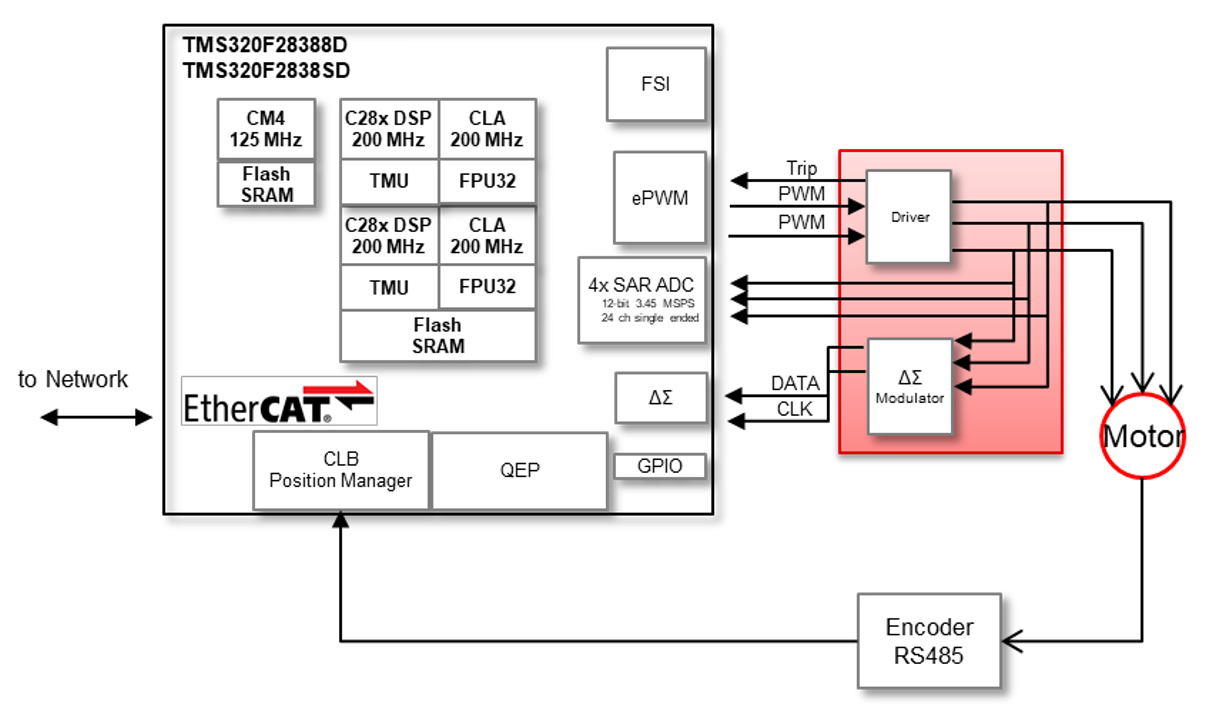
所設計的車燈驅動電路模塊采用分布式制動器控制,其控制框如圖3所示。該控制用于雙前燈的水平定位、旋轉及AFS。LIN微步進電機驅動器是一種帶集成有LIN控制/診斷的定位控制器的兩相驅動器,此控制器通過LIN接口接收高級定位指令,隨后驅動電機線圈到達理想位置。片上位置控制器可為不同電機類型、定位距離以及參數(如速度、加速度和減速度)而配置。如果系統檢測到停轉狀態,無傳感器停轉檢測就會阻止定位器失步并使電機停止。
控制器命令集的高抽象水平減少了MCU內微處理器的負載。根據前燈運動控制軸數量的不同而將調整應用是直接了當的方法。以模塊化方式擴展硬件和軟件設計,不會嚴重影響對主微控制器的要求。本系統只用一個MCU,并且要改變系統控制功能時增加或移走可選的電機很方便,花費也很少。目前的汽車常包含有帶動態位置控制的前燈。對于高強度放電(HID)氙氣燈,這種功能很關鍵。歐洲安全條例要求能動態控制主前燈光束的垂直位置,避免眩光。如果采用步進電機驅動器芯片,就可為這些應用只需幾個無源元件的類似應用設計出集成電子電機驅動器電路。
驅動器芯片通過一條LIN、I2C或SPI總線得到高水平定位控制和診斷命令指令,并將其轉換成驅動步進電機線圈的PWM信號。集成電機驅動器電路的優點包括能增加系統集成度,減小線束復雜度并降低EMI輻射,這樣能降低系統成本,加快終端產品面市時間并提高性能。傳統上來看,汽車鹵素前燈系統都裝有一個手動調節器,來對準前燈垂直方向。此裝置含有一模擬伺服系統,包含有一傳動、有刷直流電機的制動器驅動到與手動調節好的位置相對應的位置。伺服系統的反饋采用一個連接到制動器末端齒輪的電位計,電機驅動器為一功放。該系統相對來說價格低廉。







評論