水下蛇形環境勘測機器人

攝像頭擬采用usb 2.4G無線攝像頭,獨立于主控制板之外,攝像頭采集的圖像信息直接傳給地面控制終端,由專用接收器接收并顯示在PC上位機窗口中。
本文引用地址:http://www.czjhyjcfj.com/article/280696.htm

4.2 驅動關節設計
蛇形機器人每個關節處采用兩個舵機進行正交連接,實現每個關節2個自由度的控制,使得蛇形機器人能夠在三維空間運動,如圖2與圖3所示。
4.3 供電系統
采用11.1V,4000Mah,20C鋰電池組為整個系統供電,為提高機器人的續航能力,采用太陽能電池板通過升壓電路對鋰電池進行充電,機器人外殼采用透明材料(取自空飲料瓶),內表面覆蓋柔性太陽能電池板,通過多塊柔性太陽能電池板串并聯可實現對鋰電池12V/2W充電,太陽能電池板對鋰電池充電時,機器人漂浮在水面上(實際作品未使用太陽能電池板,該項功能保留,待后續開發)。
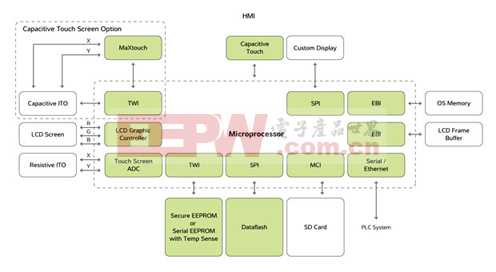
4. 4 人機界面HMI的開發
這里使用自動化組態軟件LabView來開發蛇形機器人的人機界面,其工作流程圖如圖4所示。


5 測試與驗證
5. 1 Maya運動仿真
從整個制作的過程來看,機器人整體的機械結構設計較為復雜,但是最終還是完成了結構的設計、加工與裝配。運動姿態在Maya軟件上進行了仿真測試,為蛇形機器人的步態設計帶來了方便,如圖9所示。
5. 2 實驗室測試
在Maya軟件上實現了蛇形機器人的動態仿真后,在實驗室進行了“懸空測試”,驗證所設計的步態的可靠性,如圖10所示。


5. 3 下水測試
為了進一步驗證步態設計的實際可行性以及蛇形機器人的整體防水性,團隊進行了一次下水試驗。試驗結果表明,由于蛇形機器人自身的重力略小于其所能達到的最大浮力,蛇形機器人在水中靜止狀態下可以實現漂浮,與理論計算結果相符,在水面上的二維蜿蜒步態運動效果較好,如圖11所示。


6 總結與展望
6. 1 創新之處
(1)借助于iNEMO board,使得讓原本開環的蛇形機器人系統實現了閉環控制,相比于傳統各類蛇形機器人的開環控制有了巨大的突破。
(2)正交連接的舵機組成的動力結構實現了機器人的三維運動,使得運動姿態更加豐富,應用領域也會更加廣泛。
(3)模塊化的蛇形機器人骨架設計思想,使得某一關節出現問題時可以進行獨立更換。
(4)基于LabView制作的上位機軟件功能強大,實現了各種數據和指令的實時傳輸以及攝像頭捕捉到的視頻顯示。
6. 2 展望
蛇形機器人是一種新型的仿生物機器人,與傳統的輪式或兩足步行式機器人不同的是,它實現了像蛇一樣的“無肢運動”,是機器人運動方式的一個突破,具有結構合理、控制靈活、性能可靠、可擴展性強等優點。
本文設計的水下蛇形機器人希望將來能夠在海洋復雜環境勘測中得到應用,如軍事偵察、海底礦藏調查、輸油管道檢查、鉆井平臺水下結構檢修、電纜檢查、水下考古、海上養殖及江河水庫的大壩檢查等領域。
參考文獻:
[1]葉長龍,關鼎.蛇形機器人的耦合驅動模塊化單元設計[A].沈陽工業大學學報.2004:13-17
[2] 趙鐵石,林永光,繆磊,等.一種基于空間連桿機構的蛇形機器人[A].機器人. 2006:9-13
[3]汪洋,李斌,陳麗,等.蛇形機器人控制系統的設計與實現[B].機器人.2003:17-25
4]盧振利,馬書根,李斌,等.基于循環抑制CPG模型控制的蛇形機器人蜿蜒運動.自動化學報.2006:23-28
[5]葉長龍,馬書根,李斌,等.三維蛇形機器人巡視者II的開發[J].機械工程學報. 2009:38-45
[6]左志堅,馬書根,李斌,等.蛇形機器人水下蜿蜒運動的仿真研究. 2008.5-10
[7]CRESPI A, ANDRE B, ANDRE G,et al..AmphiBot I: Anamphibious snake-like robot[C], Robotics and Autonomous Systems, v 50,n 4, Mar 31,2005,Biometric Robotics,p 163-175
[8]CRESPI A ,IJDPEERT A J. AmphiBot II: An amphibious snake robot that crawls and swims using a central pattern generator[C], Proc. 9th Int. Conf. Climbingand Walking Robots,2006,pp.19-27
[9] YAMADA H,CHIGISAKI S, MORI M,et al.. Development of Amphibious Snake-like Robot ACM-R5[C].Int.Symposium on Robotics.Vol.36.2005.133
[10] Alessandro Crespi, Andre Badertscher, Andre Guignard and Auke Jan Ijspeet,Swimming and Crawling with an Amphibious Snake Robot [C],Proceedings of the 2005 IEEE International Conference on Robotics and Automation,Barcelona,Spain, April.2005,3024-3028



評論