多功能智能室內定位導航儀設計案例

三、方案設計
本文引用地址:http://www.czjhyjcfj.com/article/274081.htm3.1 系統功能實現原理(除圖片外需有文字介紹)
3.1.1定位實現方法:
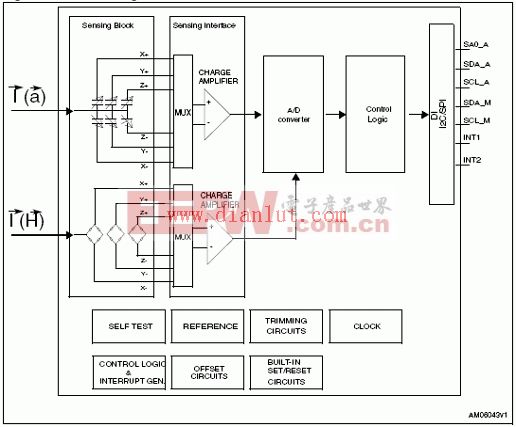
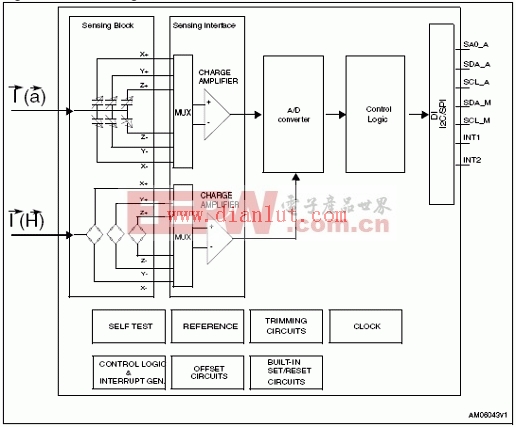
STEVAL實驗板提供LSM303DLH(六軸地磁模塊)和LPR430AL(兩軸橫滾俯仰陀螺儀) LY330ALH(一軸偏航陀螺儀),利用六軸地磁模塊中的三軸加速度傳感器測量間隔一定短時間間隔后的相對板平面的加速度![]() ,并且利用
,并且利用 ![]()
坐標系轉換公式:


其中![]() 分別是沿x,y,z三個方向在短時間內的轉過的夾角,不斷的利用以上轉換公式可以得到當前實驗板坐標系和真實空間坐標系的轉動關系,利用
分別是沿x,y,z三個方向在短時間內的轉過的夾角,不斷的利用以上轉換公式可以得到當前實驗板坐標系和真實空間坐標系的轉動關系,利用![]() 可以逆向推導出
可以逆向推導出![]() ,(在真實空間坐標系中的三個速度分量),再利用這三個速度分量可以計算出位移,從而實現在定位。
,(在真實空間坐標系中的三個速度分量),再利用這三個速度分量可以計算出位移,從而實現在定位。
3.1.2導航實現方法:
由于具體路線的計算都集中在手機中,而傳感器部分僅負責信息的采集,而手機的計算,顯示功能都十分的強我們可以將比較復雜的地圖和算法應用在手機中。
而Android手機一般是大屏幕觸摸,終點確定,位置校準都很方便,導航是需要有點考慮的地方。
我們的地圖在手機的存儲中分為兩層,底層存儲的是地圖的拓撲結構,可以根據如今的位置,使用最短路徑算法等路徑算法找到要提示的行進方向。而頂層存儲的是地圖的顯示路徑,可以在屏幕上進行顯示并進行引導。而在行進過程中也要通過傳感器確定使用者的運動方向和位置進行實時計算,提示出最新的引導方向。
3.1.3 RFID校正:
由于系統是開環系統,定位的方法利用加速度計算位移,角速度確定轉動方向的方法來最終獲取位移信息從而獲得位置信息,但是在實際中會出現以下問題:1、線加速度和角速度的獲取是間隔采樣獲得 2、實際情況中采用的是差分求和而不是積分會引入誤差 3、在獲取轉動方向的時候默認 等價,但在實際中不等價,因為宏觀的角度并非矢量4、傳感器本身誤差的存在
考慮到誤差隨著時間和位移的積累會大到有明顯影響,所以需要進行校正:1)射頻標簽來進行校正:在室內的固定地點放入射頻標簽,實驗板上加入RFID reader模塊,當到達指定地點是,用戶可通過刷卡形式進行校正。在進一步設計中可以考慮使用在固定地點放入大功率信號發射器,在用戶路過時自動接收信號進行校正。
2)人工校正:用戶可以通過手機在觀察到特定位置后可以自行校正,在比較容易識別的特殊位置,用戶可以通過觸屏進行校正,從而輔助射頻校正,實現更好的校正效果
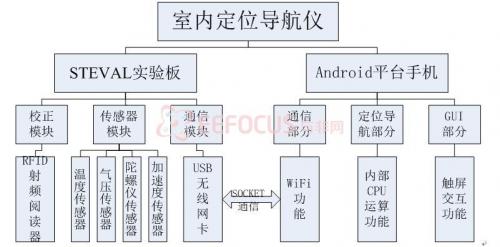
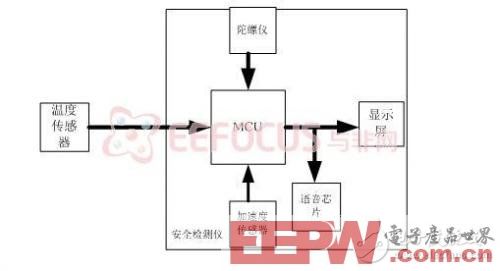
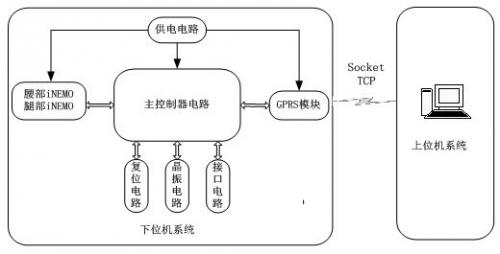
圖3.1.1 硬件架構圖
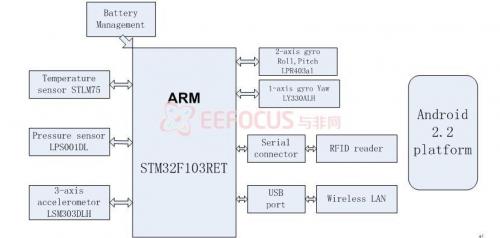
圖3.1.2 系統硬件結構框圖




評論