基于ADSP-BF561的車輛輔助駕駛系統硬件設計方案

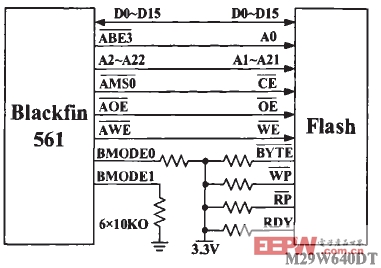
b)Flash
圖2存儲器連接
2.4并行輸入/輸出外圍接口電路
ADSP-BF561提供兩個可直接與并行A/D和D/A轉換器、符合ITU-601/656標準的視頻編碼和解碼器以及與其他通用外設連接的并行接13(PPI),每個PPI包括一個專用時鐘引腳,由時鐘電路產生。3個幀同步引腳和16個數據引腳。通過視頻解碼器ADV7183與ADSP-BF561的PPl0連接.視頻編碼器ADV7179與ADSP-BF561的PPll連接.從而實現車輛輔助駕駛系統中的環境感知傳感和人機界面功能.其連接如圖3所示。
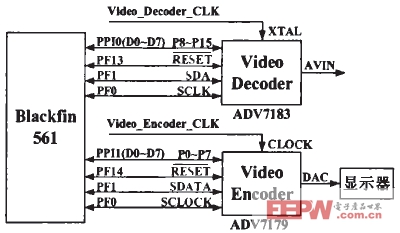
圖3并行輸入/輸出連接
2.5 CAN接口電路
CAN(Controller Area Network)總線,即控制器局域網總線.是一種有效支持分布式控制或實時控制的串行通信網絡.目前已廣泛用于汽車等控制領域。利用ADSP-BF561處理器串行SPI總線接口單元與CAN控制器MCP2515芯片的無縫連接.通過對轉換芯片內部寄存器的操作.并通過CAN接收器SN65230芯片實現數據的收發。
3 軟件及實驗分析
系統的硬件設計是后續代碼編寫和算法實現的基礎.因此完成上述系統的硬件開發后,編寫底層驅動模塊和系統軟件框架,并把視覺處理算法進行相關移植。ADI公司提供一套完整的軟件開發工具Visual DSP++,利用Visual DsP++項目管理環境,程序員可以方便的開發和調試應用程序,同時開發軟件的編譯器能有效地將C,C十+代碼轉換為Blackfin DSP的匯編代碼.采集結果如圖4(a)所示。
ADSP-BF561為對稱雙核處理器,因此在程序編寫的時采用不同內核處理不同工作,并根據硬件接口進行調試軟件的編寫.CoreA工作主要包括設置時鐘頻率、初始化SDRAM控制器、初始化視頻編解碼器、初始化PPl0和中斷、使能PPIO.以ITU656模式進行獲取,獲取到的幀存放在SDRAM中:CoreB工作主要包括設置時鐘頻率、初始化PPI1和中斷、使能PPI1,以通用輸出模式執行視頻輸出,軟件流程如圖4(b)所示。

a) 采集界面
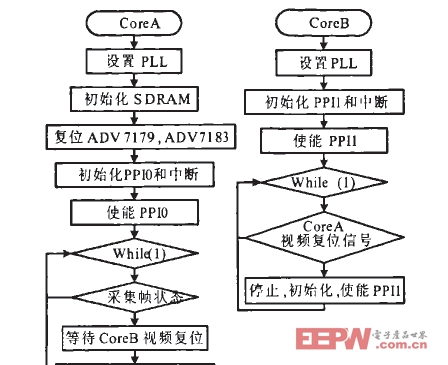
b)軟件流程
圖4采集界面及流程圖
4 結論
本系統采用了ADI公司功能強大的媒體處理器ADSP-BF561.在完成最小系統和擴展功能硬件開發后.可以在該硬件平臺上方便地進行代碼和算法開發.視覺處理系統在整個系統設計中起著重要作用.其硬件設計的成功完成.能夠縮短開發周期.降低開發成本并且為車輛輔助駕駛系統的開發打下堅實基礎。
本文作者創新點:利用數字信號處理器ADSP-BF561進行車輛輔助駕駛系統硬件設計,實現視頻實時采集與顯示.為車輛輔助駕駛視覺處理算法開發提供實驗平臺。












評論