車載姿態測量系統的開發

汽車運動狀態信息的測量和采集是汽車操縱穩定性研究和設計的基本問題,也是實現汽車電子控制及輔助駕駛系統的必要條件。這就需要一種具有足夠精度和置信度的、快速的、操作簡便的和適用范圍廣的測量汽車運動狀態的方法[1]。本文研究設計了一種基于可編程邏輯陣列(FPGA)的捷聯式車載汽車姿態實時測量系統。此系統具有體積小、使用方便、成本低廉等優點。
1 系統組成
本系統主要由傳感器組模塊、數據采集卡、便攜式計算機、電源等組成,系統硬件如圖1所示。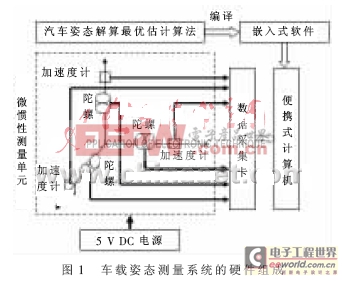
1.1 微慣性測量單元(MIMU)
自主設計的微慣性測量單元。由2個ADXL203型雙向加速度計和3個ADXRS150型角速度陀螺組成,要求3個角速度陀螺安裝在3個正交平面上,其敏感軸相互垂直,組成測量體的三維坐標系,2個雙向加速度計安裝在另外2個面上(剩下的1個面作為MIMU與汽車的安裝固定平面)。為了保證加速度計的敏感軸也組成三維坐標系,要求測量垂向加速度的2個敏感軸相互平行(由于本MIMU在垂向測量了2次,因此在數據采集階段垂向加速度取兩者的均值)。
1.2 數據采集卡
數據采集卡是基于FPGA控制和USB2.0接口的采集卡,它可實時對6路模擬信號進行不間斷的采集,輸入信號幅度范圍是0~5 V,AD轉換位數為16位,單通道采樣率為250 kS/s,所使用的USB傳輸方式為高速塊傳輸,應用FPGA作為采集的控制單元,并采用USB總線供電,移動性好,內置信號連接,可以滿足車載測量實時性和精準性的需求[2]。圖2為該數據采集卡的組成框圖。
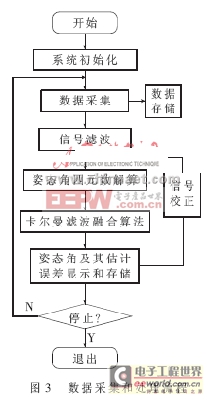
2 系統軟件
系統軟件分為數據采集軟件和數據處理軟件兩部分,其流程如圖3所示。本系統采用Visual Basic 2005語言編程實現,依次實現信號采集、初始信號濾波、姿態角解算、Kalman濾波融合、結果的顯示和存儲等功能。







評論