基于S12的光電式自動尋跡車的設計

引言
自動尋跡車是一種具備自主判斷、決策能力的綜合智能系統。它的設計集機械、電子、檢測技術與智能控制于一體,在社會生活中有著廣泛的應用,例如自動化生產線的物料配送機器人,醫院的機器人護士,商場的導游機器人等。
全國“飛思卡爾”智能模型車大賽在這樣的背景下產生,智能模型車比賽要求利用車上的視覺裝置,使智能小車在給定的區域內沿著軌跡自動行進,在確保穩定性的情況下,速度最快者獲勝,根據路徑判別的原理不同,分為光電組、電磁組和攝像頭組三種類型。本文所述智能車為光電組設計,采用與白色地面顏色有較大差別的黑色線條引導和反射式激光管識別路徑,通過舵機驅動前輪轉向,采用直流電機驅動后輪前進,并采用PWM實現電機的調速,使智能車快速、平穩地行駛。
總體設計思想
為了能夠自主尋跡行駛,智能車應具有路徑識別、方向控制、速度檢測、驅動控制等功能,根據比賽規定,本設計以飛思卡爾公司提供的比賽專用車模為載體,以飛思卡爾16位微控制器MC9S12XS128單片機作為控制核心,用激光傳感器來進行路徑識別,采用前軸轉向后軸驅動方式。為了精確的控制賽車速度,在智能車后軸上安裝光電編碼器,采集車輪轉速的脈沖信號,由主控制器進行PID自動控制,完成智能車速度的閉環控制。整個智能車的設計可分為硬件設計與軟件設計兩部分。
硬件設計
硬件系統應包括主控制器選擇、電源管理模塊、尋跡傳感器模塊、測速傳感器模塊、舵機控制模塊以及電機驅動模塊。
主控制器模塊
本設計以16位微處理器MC9S12XS128為控制核心,最高總線速度40MHz,模數轉換器(ADC)轉換時間3μs,具有出色的EMC功能。主要I/O口的分配如下:PA0~PA7共8位用于小車前面路徑識別的輸入口,PT7用于速度傳感器檢測的輸入口;PWM1用于伺服舵機的PWM控制信號輸出;PWM3、PWM5用于驅動電機的PWM控制信號輸出。
電源管理模塊
電源管理模塊為各部分提供動力,全部硬件電路的電源由7.2V鎳鎘蓄電池提供,由于系統各模塊所需電壓和電流容量不同,采用芯片LM2940將7.2V蓄電池轉換為5V電源給單片機系統、路徑識別的光電傳感器、光電編碼器等供電,由芯片LM2941提供6V為舵機提供電源,而為了提高伺服電機響應速度,電機模塊直接由7.2V蓄電池提供電源。
路徑檢測模塊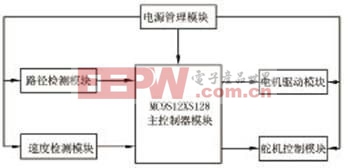
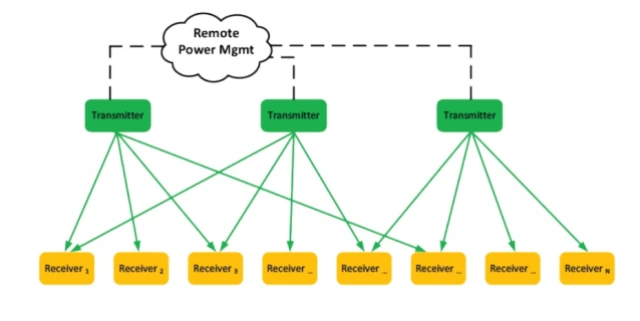
圖1 總體結構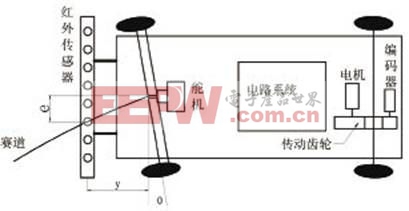
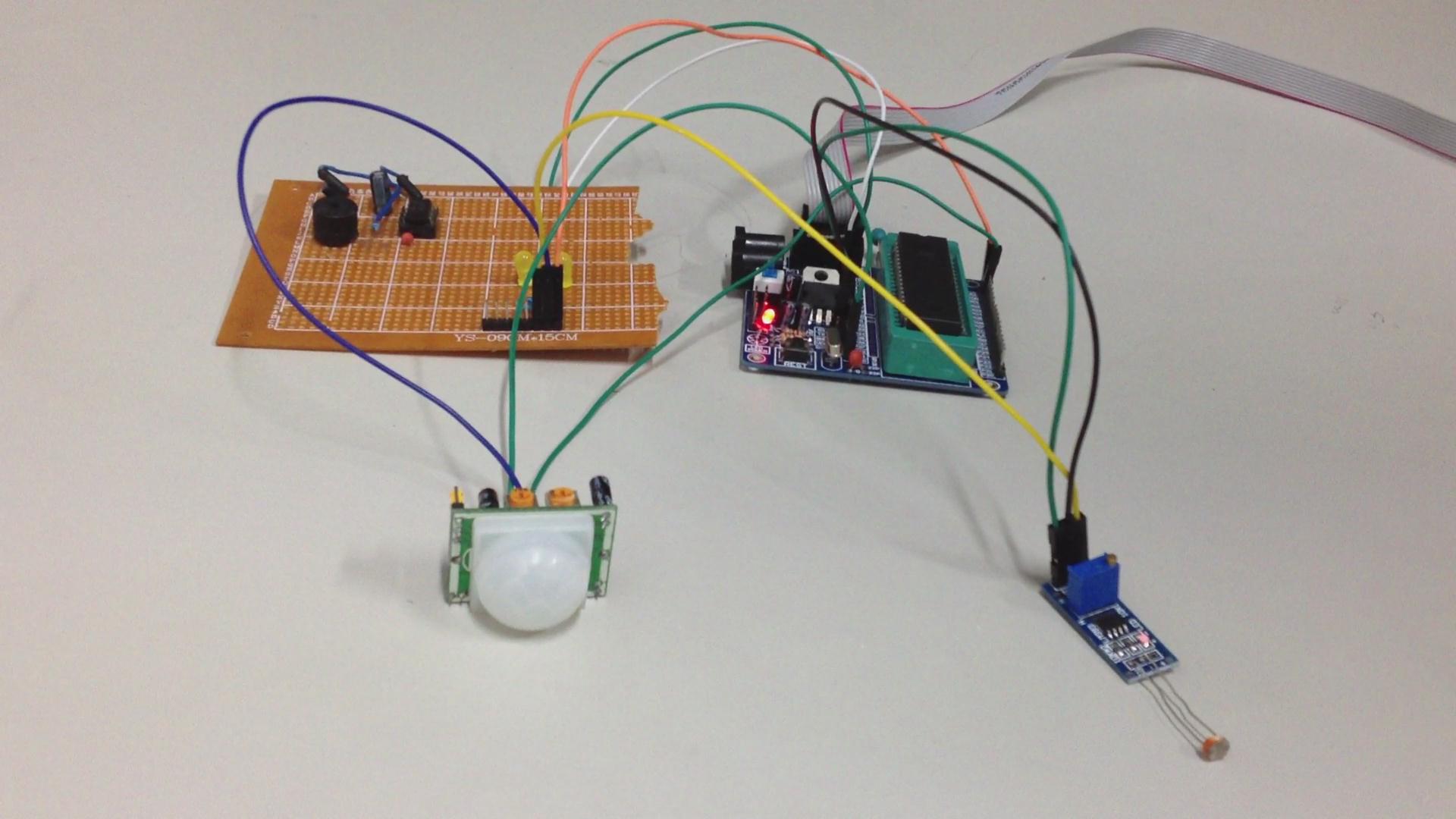
圖2 車體結構和傳感器布局及編碼




評論