基于PLC的自動尋跡運輸車控制系統設計

提高現代化工廠部門之間物料搬運和內部運輸的協調性,是實現生產全盤自動化的重要舉措。傳統物料運輸車具有設備復雜、功耗大、投資高、污染環境等缺點,其中有軌運輸車需鋪設專門軌道,若生產程序改變,需重新鋪設軌道,破壞路面,投資高;無軌運輸車包括叉車及手推運料小車,均需專人駕駛,勞動強度大CONTROL ENGINEERING China版權所有,運輸效率低。
本設計采用光電檢測技術,以日本三菱公司生產的FX-2N可編程控制器為控制核心,通過編程實現智能控制。若生產工序改變,只需重新鋪設光軌便可以相應改變。是一種新型、高效、無污染的自動尋跡運輸車,無人駕駛、安全可靠、操作方便。可降低生產成本,提高生產效率。
1系統總體方案
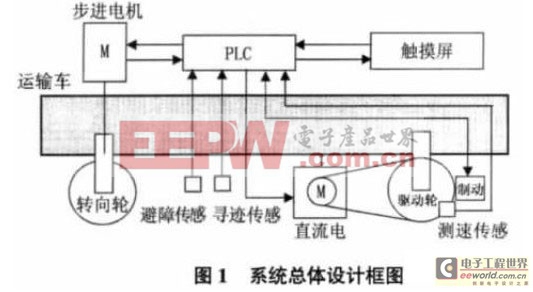
系統總體設計框圖如圖1所示,直流電機固定在運輸車底座下側,驅動后輪前進,步進電機控制前輪轉向,PLC作為控制系統中心,并與步進電機、直流電機及觸摸屏相連,得到速度、位置和障礙物信息同時輸出相應的控制命令到直流電機、電磁制動器及步進電機。觸摸屏作為操作界面CONTROL ENGINEERING China版權所有,給用戶提供一個可視化的操作平臺。
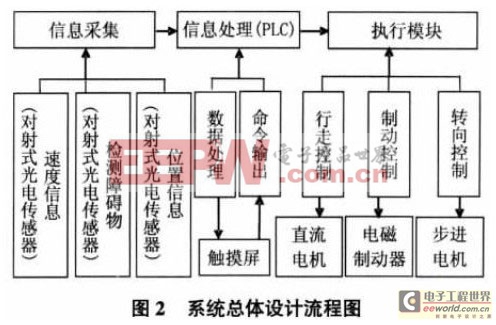
系統設計可劃分為信號檢測部分和控制部分。其中,信號檢測部分包括軌道線檢測設計、障礙物檢測設計、速度檢測設計,控制部分包括驅動控制設計、制動控制設計、轉向控制設計。系統總體設計流程圖如圖2所示。
運輸車循跡采取光電探測法的原理。在車體底部安裝3只光電傳感器,運輸車在地板上按照引導線自動運行時不斷地向地面發射紅外光。由于光電管對不同顏色的物體表面具有不同的反射性質的特點:當紅外光遇到綠色引導線時發生漫反射www.cechina.cn,反射光被裝在運輸車上的接收管接收,輸出為低電平;如果遇到其他顏色則紅外光被吸收,輸出為高電平。可編程控制器便可根據3只光電傳感器的狀態編碼為依據來確定引導線的位置和運輸車的行走路線閉。運輸車自動尋跡的位置狀態編碼如圖3所示。











評論