寶萊車的CAN總線特點分析

隨著人們對汽車動力性、操縱穩定性、安全性和舒適性的不斷追求,現代汽車上安裝了很多電子控制設備、電子部件、專用傳感器和功能各異的執行裝置。為了解決汽車電子系統控制中,許多動態信息資源共享、信息處理的實時性等問題,大多數中、高檔汽車上都采用了CAN總線技術作為控制器聯網手段。寶萊車的CAN總線具有高可靠性全面提高了寶萊車的動力性、經濟性和安全性。
一、寶萊車CAN總線的組成與結構
寶萊車采用兩條CAN總線,即驅動系統CAN總線和車身系統CAN總線,這兩總線完全能夠滿足ISO的定義。驅動系統CAN總線,其通信速率為500kbps,被稱為高速CAN,其連接對象為汽車動力和傳動機構的控制單元等。汽車發動機控制單元、自動變速器控制單元、ABS控制單元、安全氣囊控制單元等。車身系統CAN總線,其通信速率為100kbps,被稱為低速CAN或舒適系統CAN,其連接對象為中央控制器,4個門控制器等。此外寶萊車還有一個重要特征,便是在車身系統的CAN中引入了網絡管理的概念。這對于事件觸發性質的數據通信來說是非常合適的。
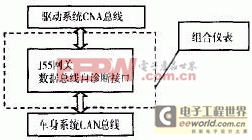
用于驅動系統的高速CAN和用于車身系統的低速CAN是兩個相互獨立的總線,但從資源共享的角度來看,它們之間最好有座連接橋梁,以使車身系統也能獲得驅動系統的信息。當然,從傳統思路來考慮,只要增加幾根導線似乎就能解決問題。但從實際開發時,即在現有的控制器硬件上,要增加哪怕一個信號引出腳都將導致硬件的重新設計,往往成本和進度都不允許這么做。為了獲得對方系統的信息,而又不涉及到硬件上的任何改動,寶萊車使用了網關—J533完成了此任務,寶萊車的網關是“寄生”在組合儀表內的如圖1所示。
二、寶萊車驅動系統CAN總線
寶萊汽車上典型的與驅動系統有關的控制單元有電控燃油噴射系統、自動變速器系統、防抱死制動系統(ABS)、安全氣囊系統等。
由于每個控制單元對實時性的要求是因數據的更新速率和控制周期不同而不同的,為了滿足各子系統的實時性要求,與對公共數據實行共享,如發動機轉速、車輪轉速、油門踏板位置等,如寶萊車的4缸汽油機運行在4000r/min,則電控單元控制兩次噴射的時間間隔為6ms,其中噴射持續時間為30度的曲軸轉角(1ms),在剩余的5ms內須完成轉速測量、油量測量、A/D轉換、工況計算、執行器的控制等一系列過程。這就意味著數據發送與接收必須在1ms內完成,才能達到汽油機電控的實時性要求。這就要求其數據交換網是基于優先權競爭的模式,且本身具有極高的通信速率,寶萊車采用了CAN總線正是為滿足這些要求而設計的。
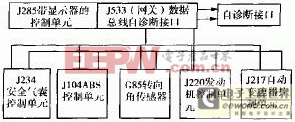
寶萊汽車驅動系統CAN的主要連接對象如圖2所示。顯然,將以上控制器歸并到一根總線上是非常合理的。因為它們所具備的基本特征是一致的,所控制的對象是與汽車的行駛直接有關的系統,它們之間存在著較多的信息交流,而且很多都是連續的和高速的。這樣可提高發動機的動力性、經濟性和排放性能。
二、寶萊車驅動系統CAN總線
寶萊汽車上典型的與驅動系統有關的控制單元有電控燃油噴射系統、自動變速器系統、防抱死制動系統(ABS)、安全氣囊系統等。
由于每個控制單元對實時性的要求是因數據的更新速率和控制周期不同而不同的,為了滿足各子系統的實時性要求,與對公共數據實行共享,如發動機轉速、車輪轉速、油門踏板位置等,如寶萊車的4缸汽油機運行在4000r/min,則電控單元控制兩次噴射的時間間隔為6ms,其中噴射持續時間為30度的曲軸轉角(1ms),在剩余的5ms內須完成轉速測量、油量測量、A/D轉換、工況計算、執行器的控制等一系列過程。這就意味著數據發送與接收必須在1ms內完成,才能達到汽油機電控的實時性要求。這就要求其數據交換網是基于優先權競爭的模式,且本身具有極高的通信速率,寶萊車采用了CAN總線正是為滿足這些要求而設計的。






評論