三相并網逆變器的基礎分析

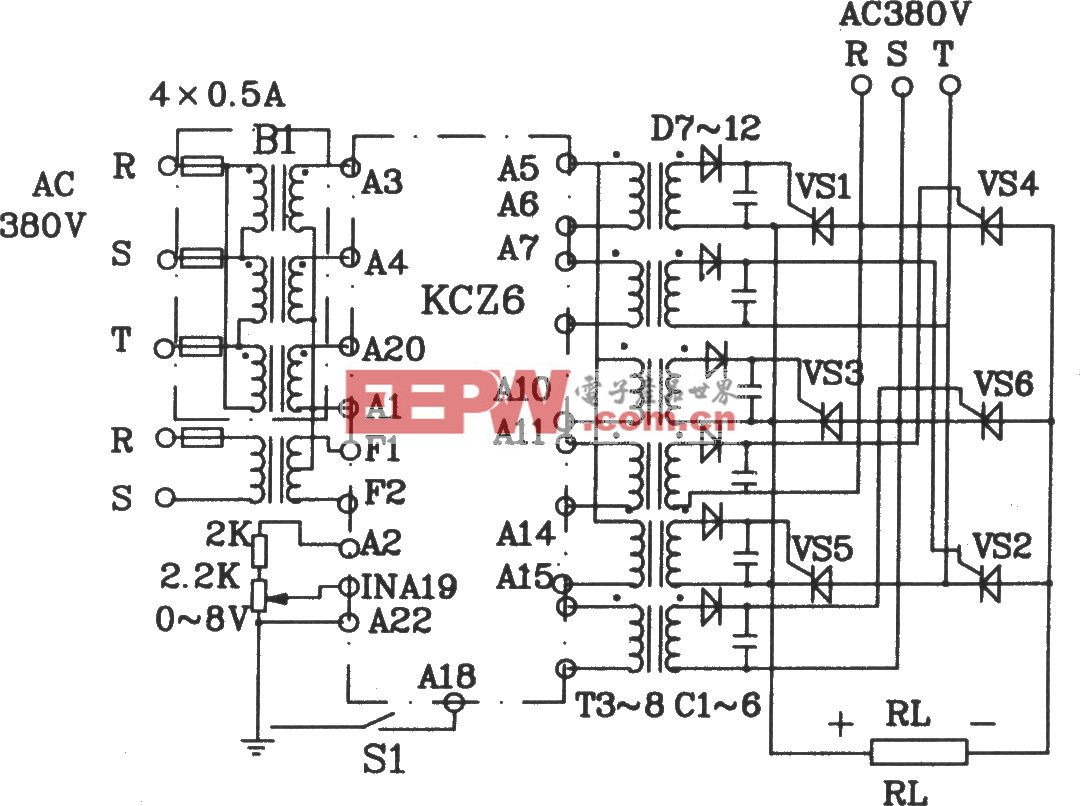
三相并網逆變器基本上都是基于PWM整流器的拓撲結構。如圖所示
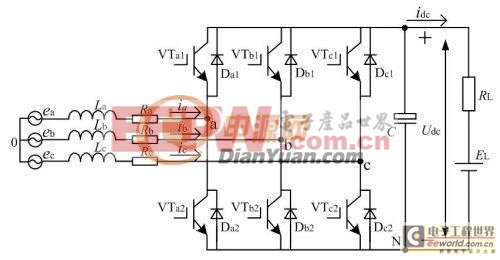
e為電網電壓,V為橋臂中點電壓,等效阻抗壓降UR=iR,等效電感壓降UL=jwLi,(電壓超前電流90°)則滿足如下等式:e=v+UR+UL
在e固定,電流幅值恒定,角度變化時,v的軌跡組成一個圓,如下圖所示。

也就是說這種拓撲的逆變器可能工作在四象限,可整流可逆變可變功率因數,故常成為“變流器”。
(A)、式子可以看出V與i是相互影響的,確定了i就確定了v,確定了v就確定了i.
(B)、變流器工作在哪種狀態有i確定。
(C)、直接受我們控制的是6個開關管的通斷,當6個開關管的通斷狀態確定時,V處的電壓也跟著確定。
從上面三點可以看出,要控制變流器的運行,只要按照三步來做就可以。
(1) 確定變流器的電流
(2)通過電流確定三相橋臂的中點電壓
(3)由三相橋臂中點電壓求三相橋臂的驅動信號。
下面將這三步分開分析,不一定按照這個次序來,先分析簡單的。中途需要涉及到其他知識的,也提前先列出來。
電流的確定涉及到整個系統的控制策略,是系統的核心,放最后一部分說。
先說第二個有i確定橋臂中點的電壓。
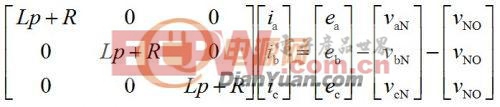
參考上面的圖,有基爾霍夫定律得:
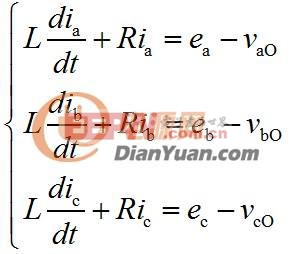
同時有:

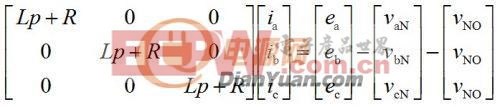
換個寫法,用矩陣來表示,計算的時候好計算。用p表示微分算子,則上面的式子可以表述為:
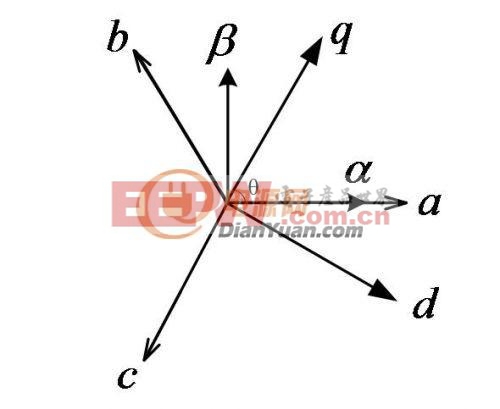
在三相系統中,常見的有三種坐標系:三相靜止坐標系(abc)、二相靜止坐標系(alpha-beta)、二相旋轉坐標系。
平常見的ABC分布在平面上,互差120°就是三相靜止坐標系。因為這個是二維平面,用二個不用向的矢量就可以表述整個平面上的向量,因此用平面上二個垂直的坐標系就可以表示三相坐標系中的量,即為二相靜止坐標系。在三相或二相靜止坐標系中,各個量(電壓電流。。。)都是余弦函數,是個變化的數值。這二種坐標系的的特點是坐標軸都是固定的,數值是變化的。計算起來也麻煩。
如果我們將坐標軸按照電壓或電流的頻率來旋轉,在軸上通一幅值為電壓或電流最大值的直流量時,就發現這個直流量在靜止坐標系上的投影就是電壓或電流在靜止坐標系下的值。就是說這二種方法要表達的結果是一樣的,只不過是表達的方式不一樣罷了。這種坐標系(二相旋轉坐標系)的特點是坐標軸旋轉,數值是直流量。
實際上在控制的時候正常都用二相旋轉坐標系來控制。理由如下:
1、靜止坐標系下得量是一個變化的數值,用PI調節(現在用的最多的方法)時要跟蹤的是一個變化量,這樣必然會有誤差!(靜態誤差或叫靜差,這從理論上就無法消除)
2、二相旋轉坐標系的坐標軸是二個垂直的量,選擇好參考角度,就可以用一個軸表示有功一個軸表示無功,這樣很容易控制變流器的功率因數,而這個參數在并網時是有嚴格要求的。
將這些坐標系列出來;
變換矩陣如下:

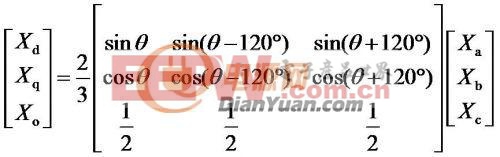
將公式
二邊都乘以三相靜止到二相旋轉變換的矩陣,化簡后得到:

這就是變流器在二相旋轉坐標系下的數學模型,下面要用這個公式的。
三相橋臂中點電壓之后怎么得到三相橋臂的驅動信號。
三相變流器常用的的調制方式有二種方式:SPWM和SVPWM,SPWM是通過查正弦表實現,SVPWM是通過矢量變換得到,其中SVPWM具有更高的電壓利用率。這里著重講述一下SVPWM調制方式。
三相正弦電壓可以用下面的式子表示:
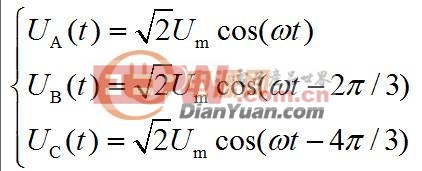
在三相靜止坐標系中分別通入三相正弦電壓,計算其合成矢量得到:

定義一新矢量U

將UA(t)、UB(t)、UC(t)帶入上式化簡得到:

以看出 U的軌跡為一個幅值等于相電壓峰值,角頻率等于正弦電壓角頻率按逆時針方向勻速旋轉的圓。也就是三相正弦電壓每一個時刻在三相坐標軸上的合成矢量對應著矢量圓上的一個點。而矢量圓上的每一個點都對應著三相正弦電壓一個周期內的一個角度。(下面用這個觀點)
下面再回頭看看三相半橋。不考慮死區時各個橋臂的開關狀態總是互補的。不會同時通也不會同時斷(斷了相當于這一橋臂沒起作用,死區時間很短,暫不考慮)。
我們把上橋臂導通下橋臂關斷定義為1,下橋臂導通上橋臂關斷定義為0.則三相橋臂一共有2的三次方=8種狀態。
在ABC=100時(表示A的開關狀態為上通下斷,BC的狀態都為下通上斷。下面的用法類同)。
A端電壓為UDC,BC端電壓都為0,此時的電路化簡為下圖的樣子
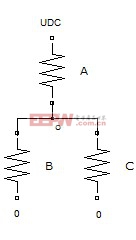
由于是三相對稱的,三個負載一樣。則很容易得到UAO=2UDC/3,UBO=UCO=-UDC/3,
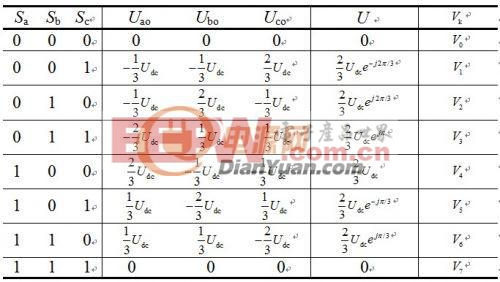
將這種狀態下的電壓帶入矢量定義公式 中得到:

U=2UDC/3,
理可以得到其他狀態的值,列入下表中
將各種狀態下的值畫在圖中如下:
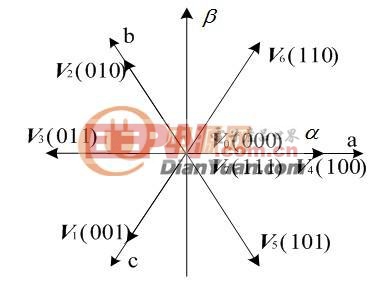
既然確定有幾個基本矢量可以合成想要的矢量。那么接下來的工作就是確定用那幾個基本矢量(就是采用哪一組導通狀態),計算出每個矢量應該作用的時間(就是確定每一組導通狀態所維持的時間)。
由于PWM信號的生成是通過定時器的實際值與比較值CMPR比較所得,因此最后要做的就是將每一組導通狀態的維持時間變成定時器中的比較值CMPR寫入寄存器中。
總結一下列出來就是:
SVPWM調制的一般步驟為:
(1) 判斷目標合成矢量所在扇區
(2) 計算相鄰2個基本空間矢量的作用時間
(3) 根據基本矢量的作用時間求定時器中的比較值。



評論