基于MSP430F的車體調平裝置的設計與實現

調整角度的計算
主控制器接收到車體的縱橫向傾斜角度后,需要計算每個千斤頂相對調整的角度,角度計算的幾何關系見圖5。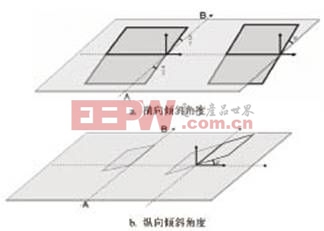
圖5 角度計算關系圖
如圖5所示,車體水平傾斜角度可反映在橫向和縱向兩個方向,圖5中a和b分別為橫向和縱向傾斜角度,設α和β為傾角傳感器得出的橫向和縱向角度。若α大于0,則A端千斤頂打高,B端千斤頂打低。兩端千斤頂各位移約為α/2乘以AB端點間隔的一半的距離,然后調整千斤頂直到橫向水準氣泡居中。若β大于0,則A端和B端同時打低,若β小于0,則A端和B端同時打高。打高過程中調整千斤頂直到縱向水準氣泡居中。
軟件設計
(1)軟件功能
軟件功能主要有:①檢測操縱指示器連接狀態;②連續讀取縱橫向傾斜角度并求平均值;③將角度值發送給操縱指示器。
(2)開發平臺
軟件開發選擇與裝置硬件中單片機相適應的IAR開發平臺,使用C語言開發。
(3)軟件流程
調平軟件完成讀取縱向與橫向傾斜角度值、模擬顯示水準氣泡指示、計算并顯示左右千斤頂調整方向等功能,其工作流程如圖6所示,其中單片機讀取角度數據的流程如圖7所示。車體調平裝置端程序通過串口讀取到傾角傳感器的縱、向傾斜角度值,根據角度值分別計算出左、右千斤頂的調整方向和模擬水準氣泡的中心位置坐標,然后將這些值通過串行通信分別發送到左、右操縱指示器上。
圖6 車體調平裝置軟件流程圖
圖7 讀取角度數據流程圖
結束語
高精度調平裝置主要用于車載火箭炮平臺和導彈發射平臺等,本文針對傳統車載平臺依靠人工手動調整平臺水平,從而導致調整時間長、精度低,進而限制影響到火箭炮等武器的機動性和快速反應能力,提出了個人的觀點和設計。本文基于MSP430F149單片機,對某型火箭炮車體調平裝置的控制原理和結構設計進行了闡述。該調平裝置將傳感器、數據模塊和無線數傳技術有機地結合在一起,可實現車體傾斜度的自動快速檢測、計算和傳輸。該裝置具有檢測迅速、控制靈活和操作簡單等優點,能有效提高某型火箭炮的機動性和調平精度。










評論