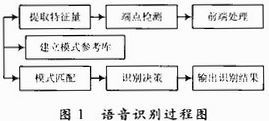
AVR單片機控制舵機

什么是舵機:
舵機如下所示:

有三根線,一般依次是地,電源(5V左右),信號(信號的幅值>=3.3V),不清楚各個腳打開舵機一測量就知道了。
2.其工作原理是:
控制信號由接收機的通道進入信號調制芯片,獲得直流偏置電壓。它內部有一個基準電路,產生周期為20ms,寬度為1.5ms的基準信號,將獲得的直流偏置電壓與電位器的電壓比較,獲得電壓差輸出。最后,電壓差的正負輸出到電機驅動芯片決定電機的正反轉。當電機轉速一定時,通過級聯減速齒輪帶動電位器旋轉,使得電壓差為0,電機停止轉動。當然我們可以不用去了解它的具體工作原理,知道它的控制原理就夠了。就象我們使用晶體管一樣,知道可以拿它來做開關管或放大管就行了,至于管內的電子具體怎么流動是可以完全不用去考慮的。
3.舵機的控制:
舵機的控制一般需要一個20ms左右的時基脈沖,該脈沖的高電平部分一般為0.5ms~2.5ms范圍內的角度控制脈沖部分。以180度角度伺服為例,那么對應的控制關系是這樣的:
0.5ms--------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;
重要說明:
1:上面部分還是成線形關系的,Y=90X-45(X單位是ms,Y單位是度數:)
2:上面所說的0度 45度等是指度 45度位置(什么意思呢:我說明一下就知道了,就拿45度位置來說,若舵機停在0度位置,下載45度位置程序后則舵機停在45度,即順時針走了45度,若當時舵機在135度位置,則反轉90度到45度位置。所以舵機不存在正轉反轉問題。這點非常重要。
3:若想轉動到45度位置,要一直產生1.0ms的高電平(即PA0=1;Delay(1ms);PA0=0;Delay(20ms);要不停的產生這個高低電平,產生PWM脈沖
請看下形象描述吧:

下面是我在ATMEGA32上的測試程序,開發軟件:ICC AVR

pwm相關文章:pwm是什么
51單片機相關文章:51單片機教程
單片機相關文章:單片機教程
單片機相關文章:單片機視頻教程
單片機相關文章:單片機工作原理
相關推薦
-
-

-
-
-
-

-
-
-
-
-

-
-
-
zhujun615 | 2013-03-22
-
-
-
-
-
評論