微波測量系統的認識和調整

微波測量系統的認識和調整
一、實驗目的
1、進一步了解波導測量系統,熟悉基本微波測量元件正確的使用。
2、掌握用頻率計校準頻率的方法。
3、掌握用駐波測量線測量矩形波導波長λg 的方法。
二、實驗原理
1、測量系統的連接與調整
進行微波測量,正確連接與調整圖1~2 所示微波測量系統。信號源在左側,待測
元件接在右側,便于操作,連接系統要平穩,各元件接頭要對準,晶體檢波器輸出引
線應遠離電源和輸入電路,以免干擾。如果系統連接不當,將會影響測量精度,產生
誤差。系統調整主要包括信號源和測量線調整,以及晶體檢波器的校準。
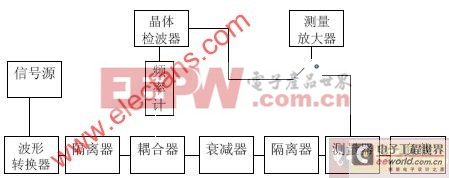
圖1-2 微波測量裝置方框圖
2、駐波測量線的調整
圖2-1 所示是三厘米波導測量線。它由開槽傳輸線,探針和傳動裝置三部分組
成,當探針經過窄槽插入波導內并與電場平行,其感應一個電動勢經同軸探針座送到
晶體檢波器,被檢波后從測量放大器電表讀出。
當探針座沿波導移動時,放大器讀數就間接地表示了波導內電場大小的分布,找
出電場的最大值與最小值及其位置,就能求出駐波大小及相位。
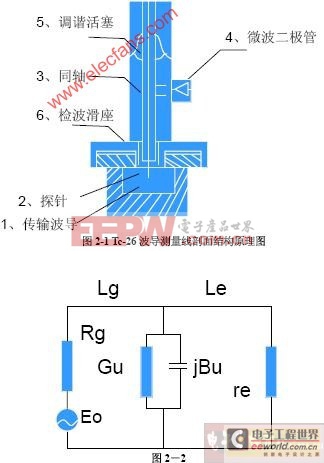
圖2-1 Tc-26 波導測量線剖面結構原理圖
當探針插入波導時,在波導中的等效導納會引起不均勻性,相當在線上并聯一個
導納,如圖2-2 所示。當終端接在任意阻抗時,由于Gu 的分流作用,駐波腹點和電
場強度都要比真實值要小,而Bu 的存在將是駐波腹點和節點的位置發生偏移。
當測量線終端短路時,駐波節點處的輸入導納Yin——>∞,駐波最大A 及最小
點B 位于Gin≈0 的圓上,如探針放在駐波的波節上B 上,由于此點處于輸入導納
Yin——>∞,故Yu 的影響很小,駐波節點的位置不會發生偏移。如果探針放在駐波
的波腹點,由于此點的輸入導納Yin——>0,故Yu 對駐波腹點的影響就特別明顯,
探針里容性電納將使駐波向負載方向偏移,如圖2-3 所示。
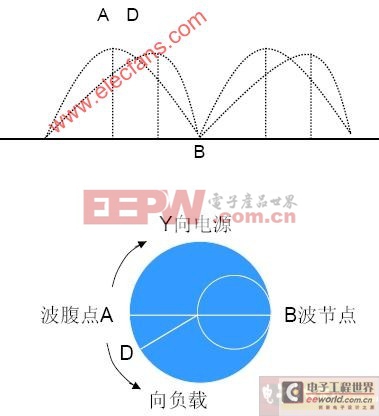
圖2-3 探針電納對駐波分布圖形的影響
所以探針引入的不均勻性,將導致場的圖形畸變,使測得駐波波腹值下降而波節
點略有增高,造成測量誤差,欲使探針導納影響變小,探針愈淺愈好,但這時在探針
上感應電動勢也變小。通常是在指示儀表上有足夠指示下,盡量減少探針深度。
調節方法是將探針深入適當深度,測量系統終端短路,將探針移至二波節點之正
中位置,調節晶體座的調諧活塞,直至輸出指示最大。
當信號源頻率或探針深度改變時,由于將探針等效導納也隨之改變,所以必須重
新對探針進行調整。
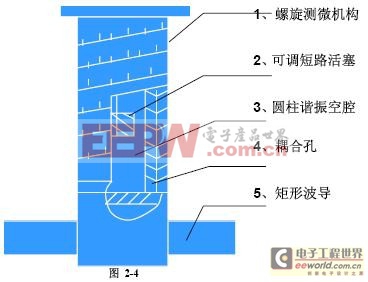
3、 頻率計
實驗中常采用吸收式頻率計,當失諧,能量通過波導管,負載指示有一個固定值,
當調到諧振點時,能量被反射,指示器讀數下降到最小,根據頻率計諧振裝置的刻度,
即可直接讀出相應的頻率,見圖2-4。
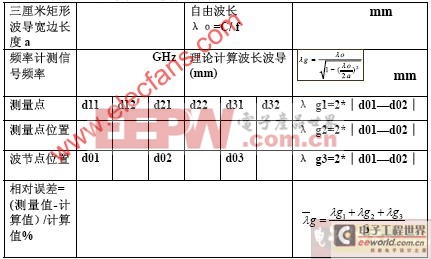
自由波長λ o 和波導波長λg 的換算方法:
λ o=C/F
式中C 為自由空間波傳播速度,約3×1010cm/s
矩形波導中的H10 波滿足公式:
λ g=λ o/√(1-(λo/2a)^2)
式中,a 為矩形波導寬邊尺寸,對三厘米波導a=22.86mm.。
4、交叉讀數法確定波節的位置
測量波節點附近兩邊指示電表讀數相等的兩點d11 和d12,d21 和d22,然后取平
均值確定波節d01 和d02 的位置,如圖2-5 所示。
d01=1/2(d11+d12) d02=1/2(d21+d22)
波導波長:λ g=2*│d01—d02│
為了提高測量精度,多測幾個波節點,求得多個波導波長,然后求平均值。
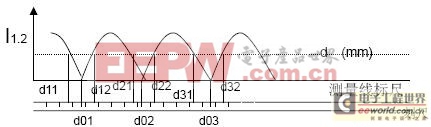
圖2—5 交叉讀數法測量節點位置
三 、實驗裝置
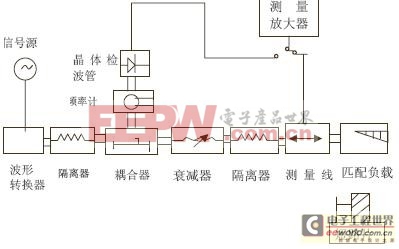
圖2-6 測試裝置圖
四、實驗內容
1、觀察了解頻率計,駐波測量線的結構形式。
2、用頻率計測信號源的震蕩頻率。
3、用駐波測量線測量場的分布圖形。
4、用駐波測量線測量波導的波長。
五、實驗步驟
1、觀察了解頻率計,測量線的結構形式,讀數方法。
2、按圖2~6 檢查整個系統。
3、按信號源調整方法進行調整,先選取信號源工作頻率,調整波形類型、功率,然
后開啟電源預熱。
① 功率計:選擇合適的探頭和量程,把探頭連到功率計上。開啟電源預熱五分鐘
探頭連到信號源上,輸出功率。
② 信號源輸出功率滿足要求,經同軸連到測量系統上。
③ 用頻率計校準頻率,晶體檢波器輸出接到放大器輸入,調諧晶體檢波器,使電
表輸出最大。緩慢調節頻率計,使電表指示變小,當指示最小點時,這時頻率
計指示頻率,就是信號源輸出信號頻率,校準后頻率不符合實驗要求,改變信
號源輸出,重新進行校準,直到達到實驗要求頻率。
④ 調整測量線,將測量線探針插入深度適當(約1.0mm)調節調諧回路,使測量
放大器指示最大。
⑤ 把探針座移到右邊,用交叉讀數法,確定波接點的位置,然后計算波導波長λ
g。畫出相應表格
六、實驗前的準備
1、熟悉測量線、頻率計的工作原理和使用方法。
2、復習信號發生器,測量放大器正確使用,考慮好實驗步驟及畫好以下記錄表格。
七、實驗報告
1、由頻率計測得信號頻率,計算波導波長,并與實測的波導波長λ g 相比較,計算
相對誤差。
2、如何正確調諧探針電路?注意什么事項。
八、思考題
1、當具有導納的探針,插入波導系統中。在終端短路的情況下,波導中真正駐波圖
形如何改變?為什么?
2、微波測量系統調整主要包括哪幾部分的調整?



評論