多傳感器融合定位在高速鐵路的應用1

遇到“城市峽谷“等障礙區時,GPS信號會消失或減弱,這時采用DR信息作為主信息。GPS失效前一點位置正好可以作為DR的初始位置,有了初始位置以后,利用里程儀和陀螺儀就可以對下一時刻列車的位置做出估計。
列車進入車站后,由于股道線間距很小,GPS和DR的定位精度已經不能很好的表現出股道的差異,因此采用查詢應答器來獲得列車在站內的定位信息。此時查詢應答器信息作為主信息,而GPS信息和DR信息作為校驗信息。
2.2 數據融合方法
該方案最核心的問題就是系統基于數據融合的定位算法的設計。在列車測速定位領域應用的數據融合方法有判斷檢測理論、估計理論、數據關聯等,而應用最廣泛的就是估計理論中的卡爾曼濾波方法。與其他估計算法相比,卡爾曼濾波具有顯著的優點:采用狀態空間法在時域內設計濾波器,用狀態方程就可以描述任何復雜多維信號的動力學特性,避開了在頻域內對信號功譜做分解帶來的麻煩,濾波器的設計簡單易行,采用遞推算法。所以卡爾曼濾波能適用于任何平穩或非平穩隨機向量過程的估計,所得估計在線性估計中精度最佳。目前已經開發的濾波算法包括線性卡爾曼濾波,擴展卡爾曼濾波以及聯邦卡爾曼濾波。該方案采用聯邦卡爾曼濾波進行數據融合。
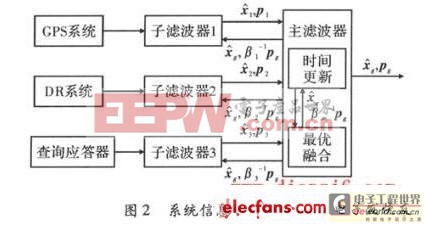
2.2.1 數據融合的聯合卡爾曼濾波模型
此濾波算法中,取βm=0,即主濾波器沒有信息輸入,進一步優化系統,減少了運算量。

電子血壓計相關文章:電子血壓計原理

評論