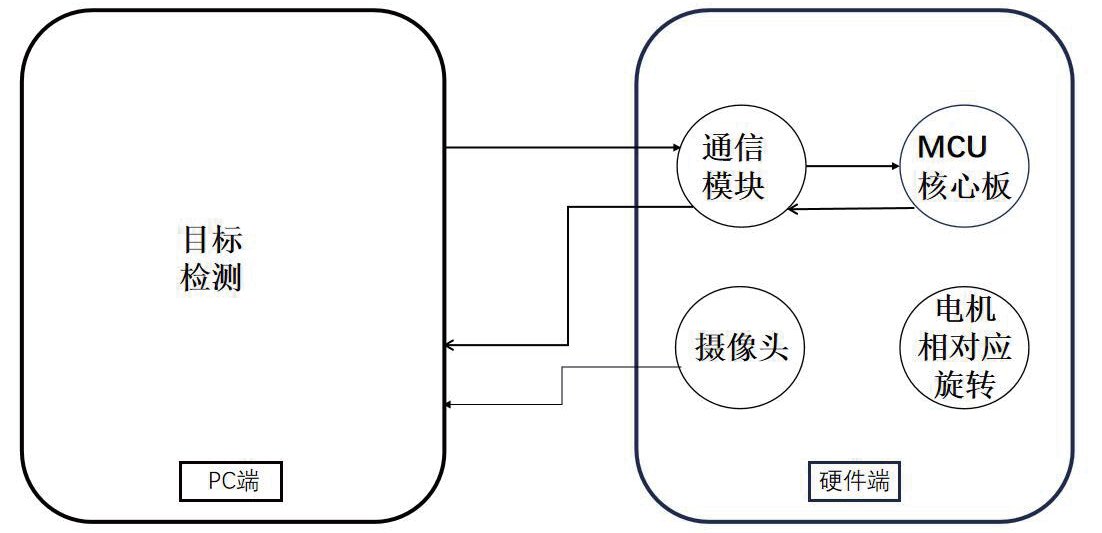
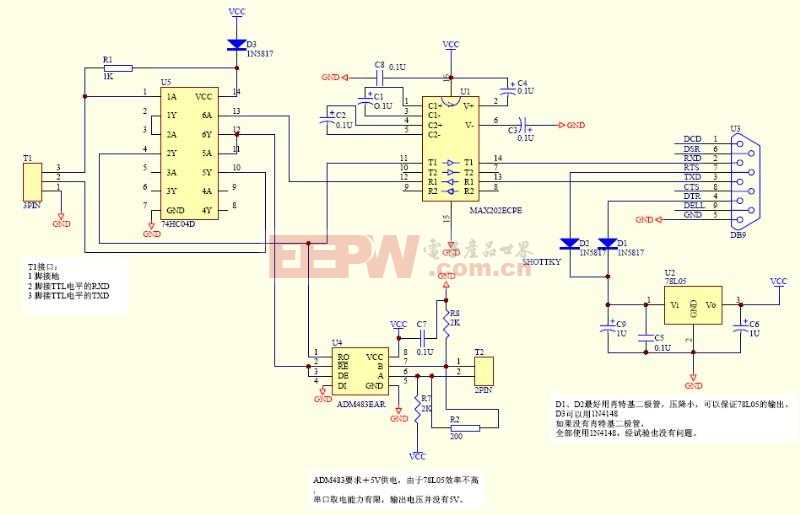
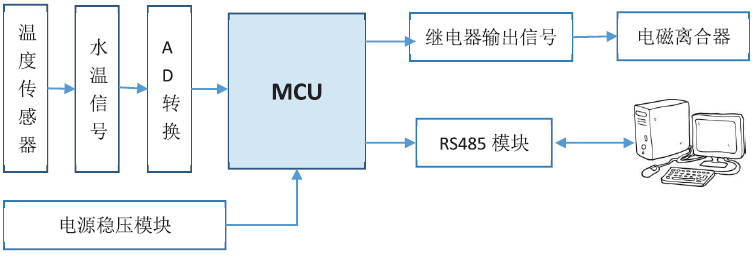
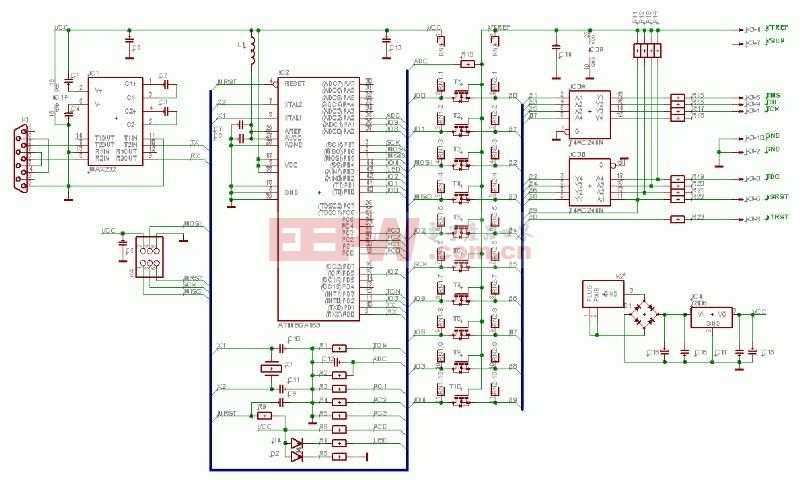
解析單片機RS485通信接口、控制線、原理圖及程序教學實例

/****************************RS485.c 文件程序源代碼*****************************/
純文本復制
#include
#include
sbit RS485_DIR = P1^7; //RS485 方向選擇引腳
bit flagFrame = 0; //幀接收完成標志,即接收到一幀新數據
bit flagTxd = 0; //單字節發送完成標志,用來替代 TXD 中斷標志位
unsigned char cntRxd = 0; //接收字節計數器
unsigned char pdata bufRxd[64]; //接收字節緩沖區
extern void UartAcTIon(unsigned char *buf, unsigned char len);
/* 串口配置函數,baud-通信波特率 */
void ConfigUART(unsigned int baud){
RS485_DIR = 0; //RS485 設置為接收方向
SCON = 0x50; //配置串口為模式 1
TMOD = 0x0F; //清零 T1 的控制位
TMOD |= 0x20; //配置 T1 為模式 2
TH1 = 256 - (11059200/12/32)/baud; //計算 T1 重載值
TL1 = TH1; //初值等于重載值
ET1 = 0; //禁止 T1 中斷
ES = 1; //使能串口中斷
TR1 = 1; //啟動 T1
}
/* 軟件延時函數,延時時間(t*10)us */
void DelayX10us(unsigned char t){
do {
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
} while (--t);
}
/* 串口數據寫入,即串口發送函數,buf-待發送數據的指針,len-指定的發送長度 */
void UartWrite(unsigned char *buf, unsigned char len){
RS485_DIR = 1; //RS485 設置為發送
while (len--){ //循環發送所有字節
flagTxd = 0; //清零發送標志
SBUF = *buf++; //發送一個字節數據
while (!flagTxd); //等待該字節發送完成
}
DelayX10us(5); //等待最后的停止位完成,延時時間由波特率決定
RS485_DIR = 0; //RS485 設置為接收
}
/* 串口數據讀取函數,buf-接收指針,len-指定的讀取長度,返回值-實際讀到的長度 */
unsigned char UartRead(unsigned char *buf, unsigned char len){
unsigned char i;
//指定讀取長度大于實際接收到的數據長度時,
//讀取長度設置為實際接收到的數據長度
if (len 》 cntRxd){
len = cntRxd;
}
for (i=0; i
*buf++ = bufRxd[i];
}
cntRxd = 0; //接收計數器清零
return len; //返回實際讀取長度
}
/* 串口接收監控,由空閑時間判定幀結束,需在定時中斷中調用,ms-定時間隔 */
void UartRxMonitor(unsigned char ms){
staTIc unsigned char cntbkp = 0;
staTIc unsigned char idletmr = 0;
if (cntRxd 》 0){ //接收計數器大于零時,監控總線空閑時間
if (cntbkp != cntRxd){ //接收計數器改變,即剛接收到數據時,清零空閑計時
cntbkp = cntRxd;
idletmr = 0;
}else{ //接收計數器未改變,即總線空
}else{ //接收計數器未改變,即總線空閑時,累積空閑時間
if (idletmr 《 30){ //空閑計時小于 30ms 時,持續累加
idletmr += ms;
if (idletmr 》= 30){ //空閑時間達到 30ms 時,即判定為一幀接收完畢
flagFrame = 1; //設置幀接收完成標志
}
}
}
}else{
cntbkp = 0;
}
}
/* 串口驅動函數,監測數據幀的接收,調度功能函數,需在主循環中調用 */
void UartDriver(){
unsigned char len;
unsigned char pdata buf[40];
if (flagFrame){ //有命令到達時,讀取處理該命令
flagFrame = 0;
len = UartRead(buf, sizeof(buf)-2); //將接收到的命令讀取到緩沖區中
UartAction(buf, len); //傳遞數據幀,調用動作執行函數
}
}
/* 串口中斷服務函數 */
void InterruptUART() interrupt 4{
if (RI){ //接收到新字節
RI = 0; //清零接收中斷標志位
//接收緩沖區尚未用完時,保存接收字節,并遞增計數器
if (cntRxd 《 sizeof(bufRxd)){
bufRxd[cntRxd++] = SBUF;
}
}
if (TI){ //字節發送完畢
TI = 0; //清零發送中斷標志位
flagTxd = 1; //設置字節發送完成標志
}
}
/*****************************main.c 文件程序源代碼******************************/
#include
unsigned char T0RH = 0; //T0 重載值的高字節
unsigned char T0RL = 0; //T0 重載值的低字節
void ConfigTimer0(unsigned int ms);
extern void UartDriver();
extern void ConfigUART(unsigned int baud);
extern void UartRxMonitor(unsigned char ms);
extern void UartWrite(unsigned char *buf, unsigned char len);
void main(){
EA = 1; //開總中斷
ConfigTimer0(1); //配置 T0 定時 1ms
ConfigUART(9600); //配置波特率為 9600
while (1){
UartDriver(); //調用串口驅動
}
}
/* 串口動作函數,根據接收到的命令幀執行響應的動作
buf-接收到的命令幀指針,len-命令幀長度 */
void UartAction(unsigned char *buf, unsigned char len){
//在接收到的數據幀后添加換車換行符后發回
buf[len++] = ‘r’;
buf[len++] = ‘n’;
UartWrite(buf, len);
}
/* 配置并啟動 T0,ms-T0 定時時間 */
void ConfigTimer0(unsigned int ms){
unsigned long tmp; //臨時變量
tmp = 11059200 / 12; //定時器計數頻率




評論