基于ATmega16的GPS經緯度數據接收系統

2 ATmega16與M12模塊的接口程序設計
系統使用ATmega16的串行口向M12模塊發出控制指令和接收定位信息。M12模塊支持。Motorola二進制格式和NMEA0183格式兩種數據輸出模式。在Motorola二進制模式下,M12以9600bps的速率輸出數據和接收指令;在NMEA0183,M12以4800bps的速率輸出數據和接收指令。默認狀態下,M12模塊工作在Motorola二進制模式下。為了獲取更高的數據傳輸速度,這里使用M12模塊默認的工作模式,即Motorola二進制模式。在該模式下,串行數據傳輸格式為:8位數據位,1位停止位,無奇偶校驗和硬件流控制。
ATmega16以通過向M12發送AT指令的方式對其進行控制。Motorola的AT I/O指令一共有69條,其中M12模塊所支持的指令有51條。利用這些指令可以很方便的對M12模塊進行日期時間設定、自定義坐標設定和定位信息讀取等操作。在本系統中,只需要讀取M12模塊的定位信息,因此程序中只用到51條指令中的1條指令:
@@EqmCCR>LF>
該指令用于控制M12模塊輸出定位信息。其中“@@”是I/O指令的前綴;“Eq”是指令的關鍵字;“m”是M12模塊輸出(響應)信息模式選擇,其數值可以是0~255之間的整數,當“m”為0時,響應信息只輸出一次,當“m”為1時,響應信息每秒鐘輸出一次,當“m”為2時,響應信息每2 s輸出一次,如此類推,當“m”為255時,響應信息每255 s輸出一次;“C”是指令的校驗和(Checksum)數據;“CR>”是回車符;“LF>”是換行符。為了便于采集定位數據,將“m”的數值設置為0,使M12模塊每接收一次指令就回復一次定位數據。
M12模塊在默認狀態下只能接受以Motorola二進制形式輸入的指令。所謂的Motorola二進制形式是指將指令的前綴、關鍵字和后綴(回車和換行)變換成相應的ASCII碼后,加上模式“m”與校驗和“C”組合成的二進制指令代碼。系統中所用到的
 本文引用地址:http://www.czjhyjcfj.com/article/197785.htm
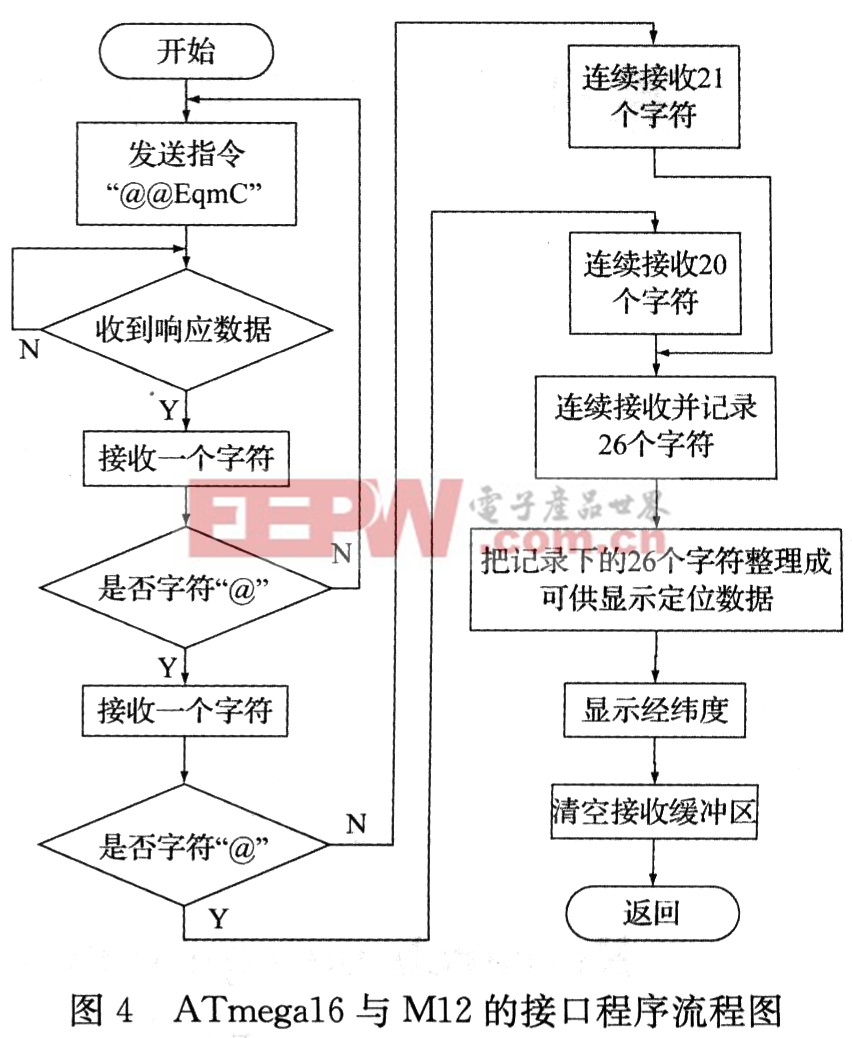
本文引用地址:http://www.czjhyjcfj.com/article/197785.htmATmega16首先請求M12模塊輸出定位數據(向M12模塊發出指令“@@EqmC”),然后等待M12模塊回送數據。當M12模塊回送數據時,ATmega16首先做出判斷,確認其收到的是預期的定位信息,然后將定位信息(經緯度數據)截取下來,整理成可供顯示數據信息后在LCD上顯示經緯度數據,最后將串口的接收緩沖區清空,以免下次接收信息時出錯。由于M12模塊在1 s之內只能響應一條指令,所以接收機的數據信息最快1 s更新一次。
3 定位精度測試
為了測試M12模塊的定位精度,在華南農業大學工程學院土槽實驗室的GPS基準點(坐標為:東經113°20.538541',北緯23°09.581834')進行試驗,用PC機連接M12開發板進行經緯度數據采集,持續運行約50 min,采集到3125組經緯度數據。通過對實測數據進行分析,M12模塊的單機靜態定位誤差≤7.81 m,符合其用戶手冊上所標的無SA政策下25 m的精度范圍。
4 結束語
從降低成本的角度出發,基于ATmega 16的GPS經緯度數據系統采用單機靜態定位技術進行地理定位,這種定位技術精度不高,但易于推廣普及,可用于普通民用地理定位領域。該系統也通過更換精度更高的GPS模塊或采用差分定位技術提高定位精度后用于專業定位導航領域。







評論