基于藍牙技術的汽車駕駛盤控制系統

3.1.3 藍牙模塊
BC219159 核心是CSR 公司推出的單片射頻芯片BlueCore2–External,包含無線電收發器、基帶控制器硬件電路及實現藍牙應用框架所必需的協議。片內含有自動校準和內置的自檢程序,從而簡化了開發、應用、和產品測試。外加存有CSR 藍牙協議棧軟件的外部Flash 時,BlueCore2–External 可構成用于音頻和數據通信的完整藍牙系統[1]。
該芯片外配元件少,RF 接收器具有接近零中頻結構,在低噪聲放大器輸入端足夠高的帶外截止性能指標允許射頻模塊靠近GSM 和W-CDMA 手機發射器使用。該芯片使用FSK 監頻器,在噪聲存在的情況下具有卓越的性能。內部功率放大器最大有+6dBm 的功率輸出,射頻合成器完全集成在內核中,不需要外接壓控振蕩器、變容調諧二極管或者LC 調諧器,系統的基準時鐘由內置的晶振產生,時鐘范圍8~40MHz.
藍牙模塊支持USB、UART、PCM 語音接口和SPI接口等多種通信接口。片上有32KB RAM,作為保存每個有效連接的音頻/數據的環形緩沖器和藍牙協議棧功能的存儲器,還有8MB 的Flash;支持點對點和點對多點網絡拓撲結構,可構成匹克網和散射網。
本系統的藍牙模塊將數據按藍牙協議轉換成相應編碼發送到對方的藍牙設備,由于BC219159 提供標準UART 接口, 因此它可以直接與本系統中的STC89LE516 的UART 口連接進行通訊。
3.2 從控設備硬件設計
從控設備硬件設計包括藍牙通信、CAN 總線控制、顯示等模塊,限于篇幅簡介如下。
3.2.1 藍牙模塊
從控設備的藍牙芯片BC219159 與單片機STC89C516 相連,當藍牙開始工作,其LED 將快速的閃爍。如果此時主控設備的藍牙模塊正在搜尋藍牙從模塊,則兩者通過自動搜尋功能自動建立連接和通訊。
從控系統中被控制的對象大部分采用5V 信號電平,故選用5V 信號電平的STC89C516 單片機,由于藍牙模塊采用3.3V,因此藍牙與STC89C516 相連時需要在串口線之間加上100Ω電阻來匹配電壓。
3.2.2 CAN 總線控制
現代汽車控制系統節點多、數量大、實時性要求高,而且大批的數據信息要求能在不同的電子器件間共享[2].CAN 總線是一種串行多主站控制器局域網總線,它具有很高的網絡安全性、通訊可靠性和實時性,簡單實用,網絡成本低,不但可以減少導線連接,而且能增強診斷和監控能力,適用于汽車及一般工業環境。本設計中CAN 控制器選用PHILIPS 公司的SJA1000。車內系統示意接線如圖2 所示。
3.2.3 顯示模塊
系統的顯示模塊采用ST7920 驅動芯片為核心的12864 液晶顯示模塊,具有64*16 位元字元顯示RAM和64*256 位元繪圖顯示RAM.系統將主控設備所調用的狀態模式及該功能下的進度,以圖片和字符形式實時地顯示在屏幕上,具有較強的直觀性,便于駕駛員及時了解車內各種電子設備的參數,使操控更方便。
4 系統軟件設計
軟件編程主要包括藍牙通訊軟件設計和主從設備應用程序設計兩大部分。
在PC 機上完成對藍牙模塊的初始化,對其設定主從,通過給藍牙分配一個地址,并確定它的波特率,來完成數據準確及時的傳輸。
BC219159 與STC89LE516 之間通過串口通訊,在程序中使用串口函數就可以互相傳遞數據,藍牙相當于一根無形的導線,接通主控和從控設備。
4.1 藍牙通訊軟件設計
兩個藍牙模塊進行數據通信是通過HCI 分組實現的。HCI 分組有命令分組、事件分組、數據分組而數據通訊流程一般包括以下6 個步驟:藍牙模塊初始、HCI 流量控制設置、查詢、建立連接、數據傳輸和斷開連接。
這部分程序主要借助CSR 公司的BlueLab 開發平臺,在WindowsXP 環境下用C 語言開發實現。
4.2 藍牙主從控系統應用程序設計
藍牙主、從控設備的應用程序比較復雜,軟件設計遵循了模塊化的設計思想。圖6 與圖7 分別給出了主控、從控系統部分的流程圖,所有的程序模塊均在在WindowsXP 環境下用C 語言開發實現。
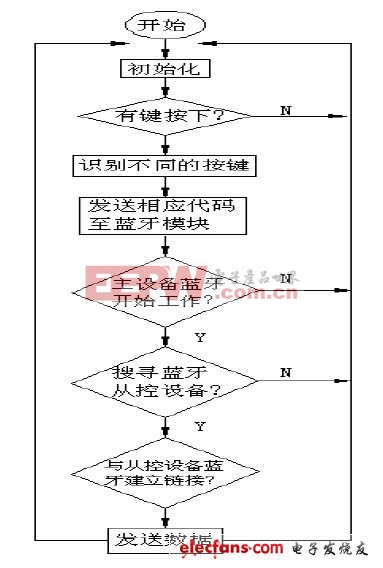
圖6 主控設備流程圖
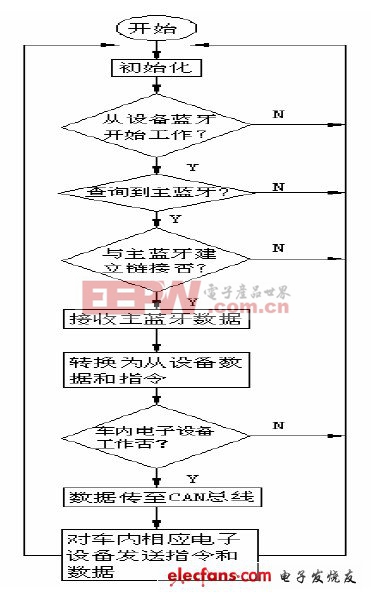
圖7 從控設備流程圖
5 結語
采用上述方案設計的駕駛盤控制系統,功能強大、性價比高、性能穩定、維護方便、開發容易。實驗表明整個系統的通用性和可擴展性較好,具有應用價值。














評論