一種基于長碼擴(kuò)頻技術(shù)的無人機(jī)遙控鏈路實現(xiàn)

3.1 偽碼捕獲與同步解調(diào)
偽碼捕獲和同步解調(diào)過程的SignalTapⅡ測試結(jié)果如圖5所示,實驗條件為兩塊實驗板之間通過屏蔽線將中頻發(fā)射和接收端直連,無噪聲干擾。
圖5(a)為偽碼捕獲完成,延遲鎖定環(huán)路還未開始調(diào)整偽碼時,信號squrtout、imagout波形在相關(guān)輸出時刻輸出了超過門限的相關(guān)峰值,PNSet信號表明本地產(chǎn)生偽碼和輸入信號偽碼相位相差3 551個偽碼時鐘,本地輸出的同步偽碼序列syPN與輸入信號的偽碼序列simrealdata的相位相差在一個chip相位內(nèi),完成了偽碼捕獲。本文引用地址:http://www.czjhyjcfj.com/article/192891.htm

圖5(b)中mI、mQ為兩路解調(diào)輸出,syb_clk為同步碼元時鐘,LRX4,LTX3分別為發(fā)射和接收的信息碼元,ph為本地NCO的同步跟蹤相位,PNSet為本地偽碼與發(fā)射信號偽碼相位差。由圖中可以看出mI,mQ已實現(xiàn)同步的解擴(kuò)解調(diào)。ph為一個鋸齒波,其斜率是載波的跟蹤頻偏,它始終跟蹤接收信號和本地載波頻率的相位偏差,保證本地載波頻率和接收信號載波頻率及相位保持一致。
3.2 低信噪比條件性能分析
圖6為系統(tǒng)高低信噪比條件對比下的SignalTapⅡ仿真圖,實驗條件為兩塊實驗板之間通過屏蔽線將射頻發(fā)射和射頻接收端連接,射頻發(fā)射端功率為0 dBm。其中圖6(a)信號無衰減,圖6(b)加110 dB衰減器。
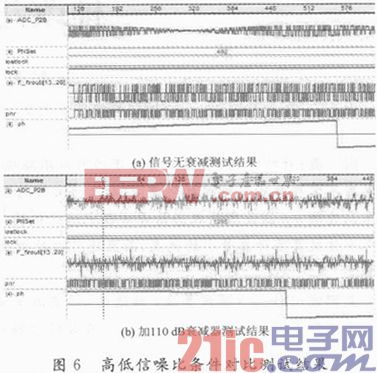
由圖6可以看出,在信號衰減110 dB后,接收到的中頻信號ADC_P2B由于信噪比很小(0 dB以下),無法看出發(fā)送信號波形,在濾波器輸出端F_firoutI信號被噪聲淹沒。然而,在該擴(kuò)頻系統(tǒng)中,采用1023擴(kuò)頻碼,系統(tǒng)理論增益為30 dB,使得信號能正常捕獲、跟蹤、解調(diào)。當(dāng)然,噪聲對系統(tǒng)依然存在很大影響,從圖6(b)可以看出,由于噪聲影響,載波跟蹤環(huán)輸出的ph信號在鋸齒波的基礎(chǔ)上,存在不規(guī)則抖動,由于系統(tǒng)選取了適合的環(huán)路增益,使得這種抖動在系統(tǒng)可接收范圍內(nèi),從而保證了系統(tǒng)正常工作。
4 結(jié)語
本文設(shè)計了基于長碼直接序列擴(kuò)頻技術(shù)的FPGA實現(xiàn)方案,重點(diǎn)闡述了長偽碼快速捕獲方法的實現(xiàn),該方法將傳統(tǒng)的偽碼相位與多普勒頻移二維搜索過程簡化為兩者同時捕獲的一維搜索過程。經(jīng)過硬件實現(xiàn)與測試,系統(tǒng)達(dá)到了設(shè)計要求,已應(yīng)用于某型無人機(jī),使用效果良好。



評論