基于SPMC75F2313A的直流伺服驅(qū)動器

 本文引用地址:http://www.czjhyjcfj.com/article/172923.htm
本文引用地址:http://www.czjhyjcfj.com/article/172923.htm由于其它模塊屬于通常的一些模塊,此處不再詳述。
5系統(tǒng)軟件設(shè)計
整個系統(tǒng)軟件分為三部分:
1. 伺服電機的核心驅(qū)動模塊,這部分主要是產(chǎn)生電機驅(qū)動所用的PWM信號和相應(yīng)的控制環(huán)路;
2. 系統(tǒng)控制程序;
3. 人機接口界面程序;
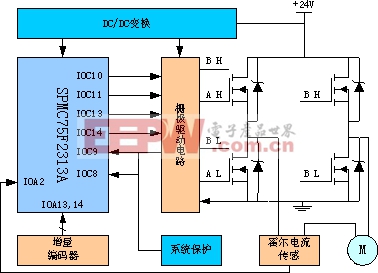
電機的核心驅(qū)動模塊的結(jié)構(gòu)如圖 5-1所示,模塊使用經(jīng)典的三環(huán)位置伺服結(jié)構(gòu)。整個驅(qū)動模塊分為位置調(diào)節(jié)器、速度調(diào)節(jié)器、電流調(diào)節(jié)器、位置計算、速度計算和電流反饋幾部分構(gòu)成。每個環(huán)節(jié)均使用改進的增量PID調(diào)節(jié)器(結(jié)構(gòu)根據(jù)各個環(huán)路的特點而有不同),電流環(huán)的反饋速度為0.05ms,速度環(huán)的反饋速度為1ms,位置環(huán)的反饋速度10ms。
各控制環(huán)的核心服務(wù)子程序的流程如圖 5-2所示。這幾部分是整個系統(tǒng)的核心,其性能也決定了整個驅(qū)動器的性能。因此,這幾部分使用純匯編編寫,相應(yīng)的PID算法也根據(jù)不同控制環(huán)的特點進行相應(yīng)的結(jié)構(gòu)調(diào)整和性能優(yōu)化。以最大限度保證這幾部分程序的性能和實時性。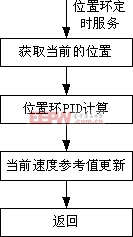
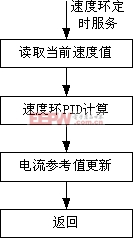
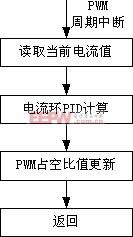
圖 5-2 PWM周期中斷服務(wù)子程序流程圖
系統(tǒng)控制部分是整個系統(tǒng)協(xié)調(diào)的心臟。整個系統(tǒng)都在其協(xié)調(diào)下有條不紊的工作。這部分主要是根據(jù)系統(tǒng)設(shè)置和當(dāng)前系統(tǒng)的狀態(tài)給出相應(yīng)的控制信息,以確保系統(tǒng)的可靠運行。
人機接口界面程序,這部主要是為用戶提供一個簡單易用的交互接口,以方便用戶對驅(qū)動器的可靠控制。包括驅(qū)動器的起停、各種運行參數(shù)的設(shè)置都在這一層面上進行。
6結(jié)語
通常,在開發(fā)伺服驅(qū)動設(shè)備的過程中,需要編寫實時性、程序可讀性強的代碼,這時就需要采用混合編程。而凌陽的m’nSP™ IDE具有良好的編程環(huán)境,它可以很輕松、容易地進行混合編程(在C程序中調(diào)用匯編程序,在匯編程序中調(diào)用C程序)。
該系統(tǒng)用了SPMC75F2313A三個定時器和約30個IO口資源,其實SPMC75F2313A的資源相當(dāng)豐富。因其有專業(yè)的電機驅(qū)動硬件支持,電機驅(qū)動系統(tǒng)開發(fā)變得相對簡單。因此,基于SPMC75F2313A的電機伺服驅(qū)動器系統(tǒng)在工業(yè)、醫(yī)療、國防等領(lǐng)域有廣闊的應(yīng)用前景。

伺服電機相關(guān)文章:伺服電機工作原理








評論