基于可拓控制算法的改進與仿真研究


其中:e(t),u(t)分別為PID控制器的輸入和輸出;KP,KI,KD三個參數的整定采用Ziegler一Nichols方法。為方便起見,此時記u(t)=u(PID)。
(2)測度模式M2。采用改進的可拓控制算法,控制器的輸出為:
u(t)=y(t)/k一K(s)psgn(e)+D(s)sgn(e)
其中:u(t),u(t一1)分別為控制器當前時刻和前一時刻的輸出;y(t)為當前時刻被控量的采樣值;k為過程的靜態增益;Kci為第M2i個測度模式的控制系數;K(s)為特征狀態S的關聯度;D(s)為狀態距;戶為修正因數;sgn(e)為偏差的符號函數,與上述取法相同。
(3)測度模式M3測度模式M3對應的特征狀態較大地偏離經典域,處于非域范圍內,此時控制器的輸出取幅值。
綜上所述,可拓控制器的輸出算法如下:
2 可拓控制算法的仿真研究
在該仿真部分,將采用相應的線性對象、延遲對象和非線性對象對改進的可拓控制算法進行仿真試驗,并與傳統的可拓控制算法和PID控制算法進行比較。其中,PID控制參數的選取均采用Ziegler-Nichols方法整定后的參數,輸入信號為單位階躍信號,仿真時間為500 s。
2.1 線性對象
取線性對象的傳遞函數為:G(s)=1/(10s+1)4,則控制效果如圖3所示。

圖3中,PID表示PID控制輸出,EC表示傳統的可拓控制算法輸出,IEc表示改進后的可拓控制算法輸出。
由圖3中曲線可知,在誤差允許范圍內,PID控制、EC和IEC均能收斂,從而達到較滿意的控制效果。與其他兩種控制方法相比,IEC不但能更快地收斂于穩定值,而且超調量也比較小。
2.2 延遲對象
取延遲對象傳遞函數為:G(s)=e-10s/(5s+1)4,則控制效果如圖4所示。

由4圖中曲線可知,在誤差允許范圍內,PID控制、EC和IEC均能收斂從而達到較滿意的控制效果。與PID控制相比,IEC能更快地收斂于穩定值;與EC相比,除了能更快地收斂外,IEC的波動較小、超調量幾乎為0。
2.3 非線性對象
取非線性對象為開環傳遞函數G(s)=1/(10s+1)4的單位反饋輸出的平方,控制效果如圖5所示。
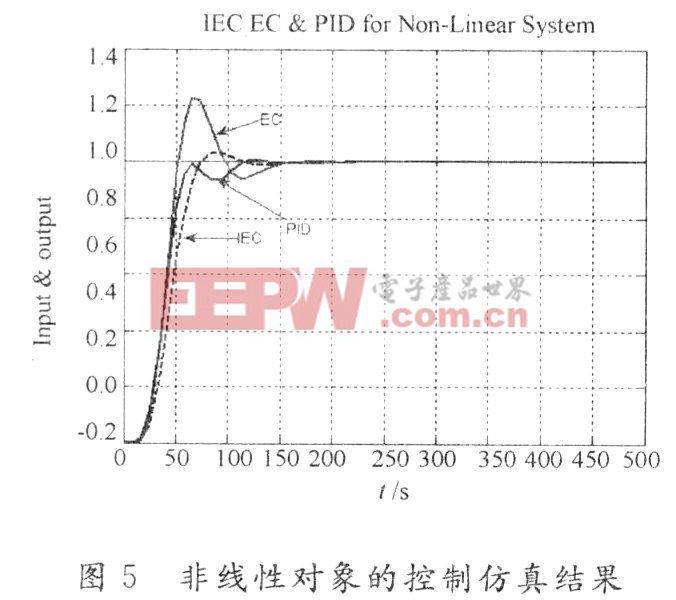
由圖5中曲線可知,在誤差允許范圍內,PID控制、EC和IEc均能收斂從而達到較滿意的控制效果。與PID控制相比,IEc能更快地收斂于穩定值;與EC相比,除了能更快的收斂外,IEc的波動和超調量均較小。
3 結 語
從仿真研究來看,改進的可拓控制算法具有參數整定簡單、響應快速且穩定等特點。并應用于線性對象、延遲對象和非線性對象進行仿真研究,驗證該算法的可行性和有效性。結果證明了可拓控制具有良好的控制品質和較好的自學習能力,有較好的發展前景。







評論