基于PROFIBUS-DP現場總線的恒溫控制系統

(1)在t1和t4階段:若ek<-a,則停止加熱;若ek≥-a,即誤差在允許范圍內,此時,又分兩種情況討論:
a)當在t1階段時,則開始加熱。在這里提前加熱,是為了防止輸出量繼續下降,反方向偏離給定,從而使輸出維持在誤差允許范圍內;
b)當在t4階段時,則維持原狀態。
(2)在t2和t3階段:若ek≥b,則開始加熱;若ek<b,即誤差在允許范圍內,此時,又分兩種情況討論:
a)當在t3階段時,則停止加熱。在這里提前停止加熱,是為了防止輸出量繼續上升,反方向偏離給定,從而使輸出維持在誤差允許范圍內;
b)當在t2階段時,則維持原狀態。
4 新型PID控制算法在S7-300 PLC中的軟件實現
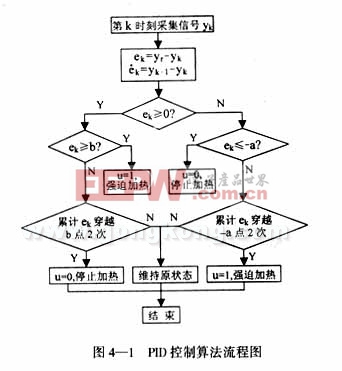
在S7-300 PLC中,使用了梯形圖編程方法。在庫中有3個與PID調節器相關的功能塊FB41、FB42和FB43。FB41用于模擬PID調節器,FB42用于數字PID調節器,FB43是脈沖發生器,用于輸出量為脈沖的PID調節器。在這里,因為輸入量是溫度信號,是模擬量,而輸出又是開關量,所以調用了功能塊FB41和FB43。新型PID算法的流程圖如圖4―1所示。
5 結束語
(1)該文使用的新型PID控制算法簡單有效,易于軟件實現,在工程應用中取得了顯著效果。
(2)使用了PROFIBUS-DP現場總線技術,使得布線簡單,數據傳輸速率高。
(3)使用了S7-300 PLC,使得系統工作穩定,抗干擾能力強,而且維修方便。

pid控制器相關文章:pid控制器原理








評論