無刷直流電機控制器UCC3626的原理及應用


2.2 測速信號
UCC3626的測速信號TACH_OUT來自內(nèi)部精確的單穩(wěn)態(tài)電路,通常由HALLA、HALLB、HALLC三個霍爾位置信號的上升沿或下降沿觸發(fā),其頻fT(Hz)和電動機的極對數(shù)p、轉速n(r/min)成正比例關系:
fT=pn/20
單穩(wěn)時間tON可由連接到R_TACH和C_TACH腳的電容R和電容C決定:tON=RC
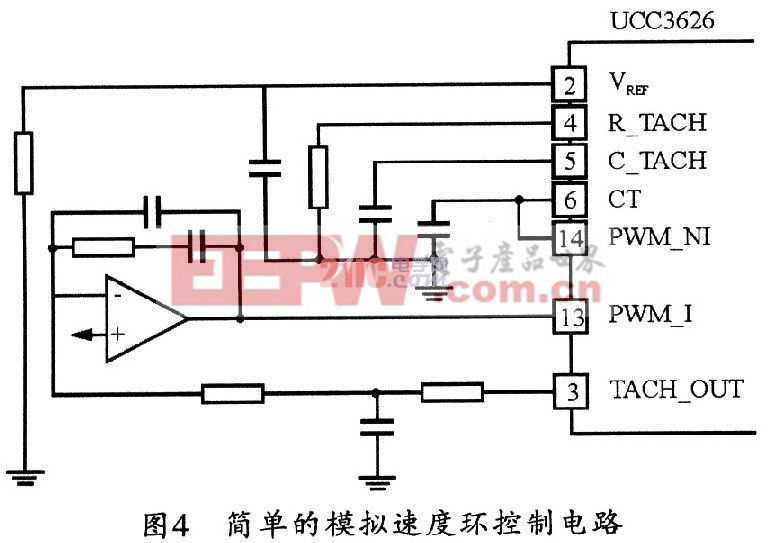
測速信號TACH_OUT可用于微控制器的數(shù)字閉環(huán)速度控制。測速信號TACH_OUT經(jīng)過濾波后所得到的速度大小模擬信號,可用于模擬速度控
制,圖4所示是一個簡單的模擬速度控制電路連接方法,圖中的速度指令信號可連接到外面附加的運算放大器上。
2.3 兩象限或四象限運行控制
電動機一般有四個可能的工作象限。兩象限控制時,電動機一般工作在I和Ⅲ象限(轉矩和轉速方向相同)。由于兩象限工作的無刷直流電
機控制器,除了摩擦力之外,沒有使負載減速的能力,因此,這種方式僅限于要求不高的場合;需四象限控制則提供四個象限工作,這時的轉矩和轉速方向相反,故可提高系統(tǒng)運動的快速性。
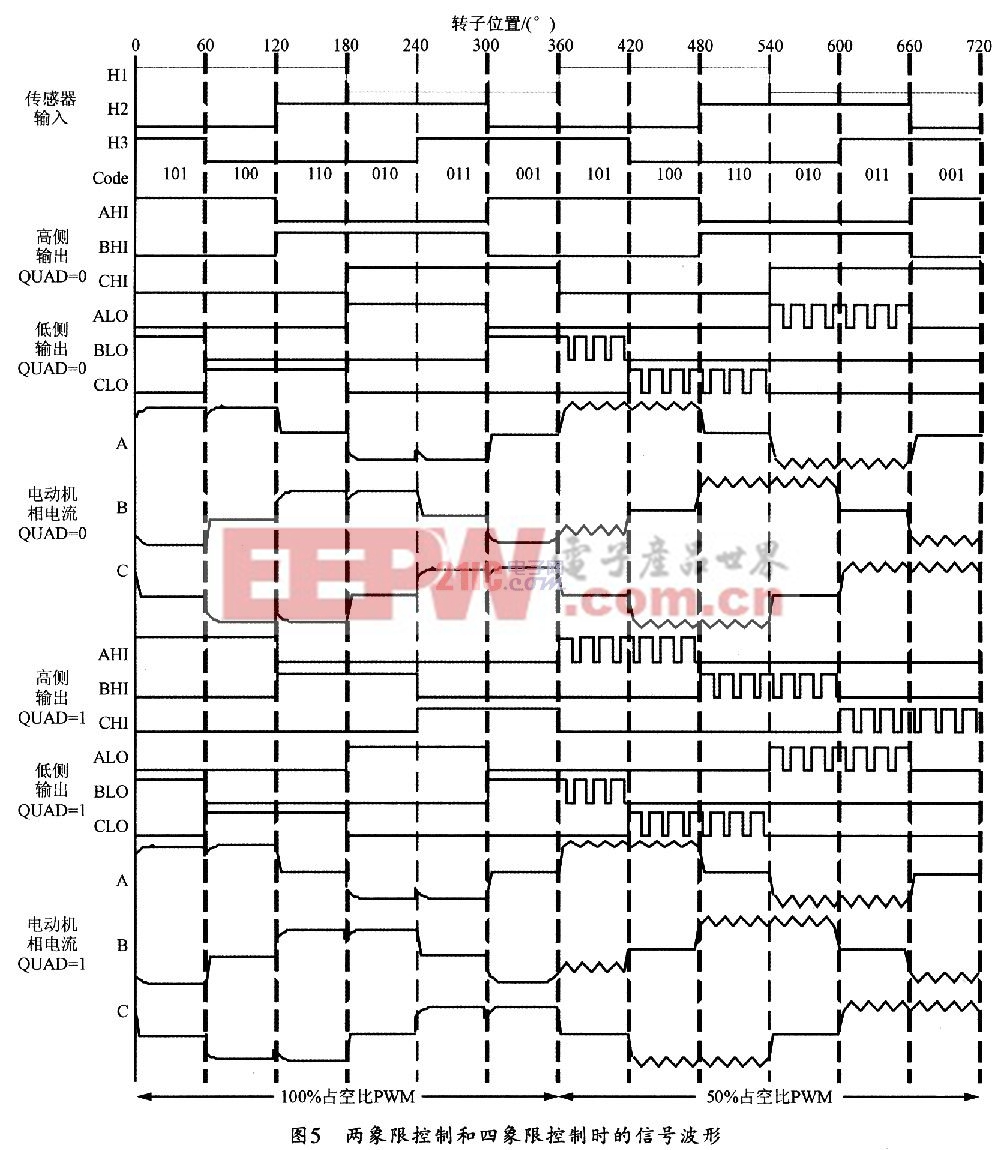
UCC3626可通過QUAD端選擇兩象限和四象限控制。當QUAD為0時,為兩象限控制,此時UCC3626只對功率開關的低側進行PWM控制;而當QUAD為l時,為四象限控制,此時高側開關和低側開關同時進行PWM控制。圖5給出了兩象限和四象限控制時的主要電流信號波形。











評論