基于時間觸發模式的HBRS控制系統混合調度器的設計

該模型中,有效排量決策模塊J8運行的前提條件是J1~J5先運行,即獲得各種開關狀態、車速和蓄能器壓力,缺一不可。經過邏輯判斷后決定HBRS的工作模式。J8有分支,J8判斷系統工作模式State為能量保持工作模式時,J10直接發出默認的驅動命令即可,不觸發J9。J10控制各電磁換向閥的開關狀態,控制電磁離合器的結合/分離狀態。J9在制動能量回收工作模式時,需要獲得車速、制動踏板行程,查詢最佳排量對應的控制電流,在制動能量再生工作模式時,需要獲得車速、加速踏板行程,查詢最佳有效排量對應的控制電流。J10根據當前車輛制動加速度以及反饋電流的大小,對控制電流值進行修正,并發出驅動命令到驅動模塊。J9和J10均在不同工作模式下,需要不同的傳感器信號或狀態變量,因此需要添加判斷程序,從而實現在不同工作模式下觸發不同控制程序的目的。
2.3 任務劃分
根據任務劃分原則為I/O依賴性、功能內聚、任務內斂,將13功能模塊劃分為6個任務,如表2所列。9個任務中R1~R6由系統控制處理器芯片調度實現,R7~R9由微控制器集成外設控制。J10和J11由芯片TLE6230GP實現驅動,J12則由控制芯片的PCA及擴展芯片33486A實現,并由單片機PCA模塊實現PWM信號輸出。

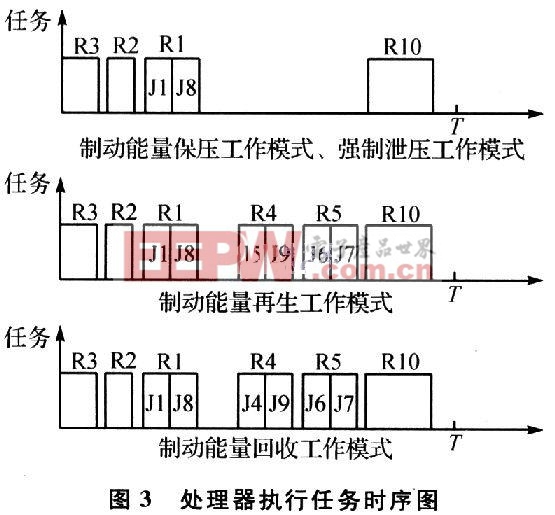
當HBRS使能開關打開時,系統共有4種工作模式:制動能量回收模式、制動能量再生模式、制動能量保壓模式和制動能量強制泄壓模式。HBRS進入何種工作模式由控制系統進行邏輯判斷,因此任務R1工作模式決策組合是周期性運行的任務。若判斷系統進入制動能量保壓工作模式或強制泄壓工作模式,則直接任務R6 驅動組合;R6發出控制外設的驅動命令,通過任務R7、R8運行,控制電磁換向閥的通斷實現油路的變換,控制電磁離合器的結合/分離實現HBRS與車輛原動力傳動系統的分離;若R1判斷系統進入制動能量回收工作模式或者制動能量釋放工作模式,則觸發任務R4查詢目標驅動電流值,并觸發任務R5計算車輛加速度和任務R6計算反饋電流值提供給任務R10以修正目標驅動電流值;最后,通過任務R9實現對HBRS系統有效排量的調整。
確定所需的時標間隔的過程是:為了把開銷和功耗降低到最小值,調度器的時標間隔應該設置為所有任務的運行間隔的“最大公因數”,并且滿足所有任務的運行時間都應小于調度時標間隔,以保證調度程序總是能夠在任何任務需要運行的時候調用它,還要求盡可能地避免任務的抖動。
于是,在不同的工作模式中控制系統的任務都在確定性時間段內完成檢測和驅動任務,簡化了系統設計的復雜性,更可靠,更安全。
控制系統處理器執行任務的時序如圖3所示。
4 仿真
某控制系統基于采用新華龍公司C8051F005最小系統板。首先統計該系統下單個任務運行的瞬時特征,建立實時系統分析模型,實施混合定時調度算法,并統計CPU利用率和任務延時,進行驗證。
控制系統瞬時特征數據如表3所列,其中,任務運行周期T根據系統性能的需要提出,而且,在開發平臺上是可行的,最大執行時間tE為開發平臺上反復運行并求取最大值的結果。












評論