基于對目安全二極管激光掃描技術的飛機泊位引導系統

圖2對駕駛員指令顯示裝置飛機在引導過程中,互動顯示板將會顯示不同的指令,駕駛員根據不同的指令進行下一步的操作,圖2為對駕駛員指令2型顯示裝置。
如圖2所示,先確認飛機型號的表示是否正確,“浮動”的箭頭表示系統處于動作狀態。
跟隨引導線,當二條直立的接近速度表示排變為黃色時,則顯示激光已捕捉到飛機,并進入識別狀態,掃描裝置檢驗飛機型號正確與否,然后顯示方位信息指導。
找到閃爍的紅色箭頭及表示方位指導信息的黃色箭頭,閃爍的紅色箭頭表示方位偏差,黃色塊狀表示飛機離開中心線的距離。
當飛機接近至最終停止位置12米處時,駕駛員可得到接近率信息,飛機每向前前進0.5米,黃色發光二極管燈排則消燈一行。
當飛機到達適當的停止位置時,畫面在顯示“停止”的同時,方位顯示區域顯示2個紅色矩形停止指示排,而接近率黃色顯示區域則全部熄滅。
飛機停止于正確位置時,2-3秒后,畫面顯示“OK”;如果飛機超越停止線時,畫面顯示“TOO FAR”。
飛機至少在距離停止位置12米處時,必須被系統識別,如達不到,系統將顯示“STOP”,然后,方位顯示區域為2個紅色矩形停止指示排,并顯示“WAIT”字樣,在此期間,系統再次對飛機進行識別,成功時,則繼續停靠,反之則顯示“停止”。
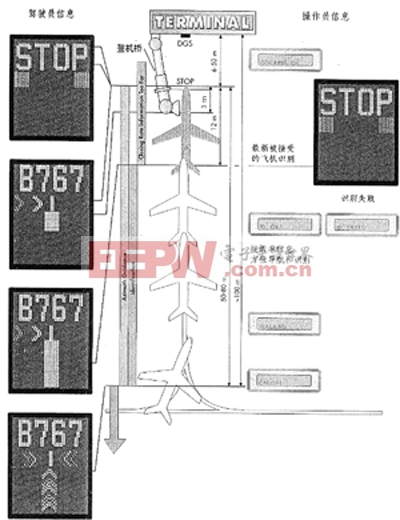
圖3飛機泊位引導示意圖 從圖中可以看出,飛機的泊位過程一直是激光定位飛機位置的過程,體現了該系統及時、準確、明了,與傳統圖形識別泊位系統相比,有它的顯著特點。
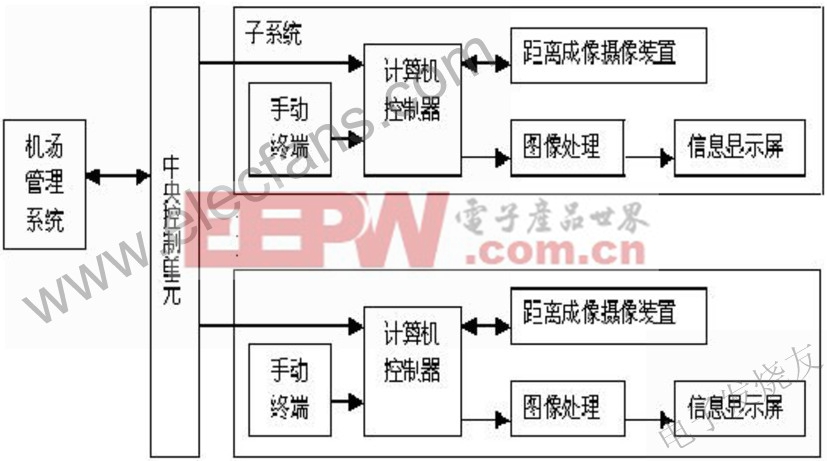
圖4為傳統圖形識別飛機泊位引導系統。

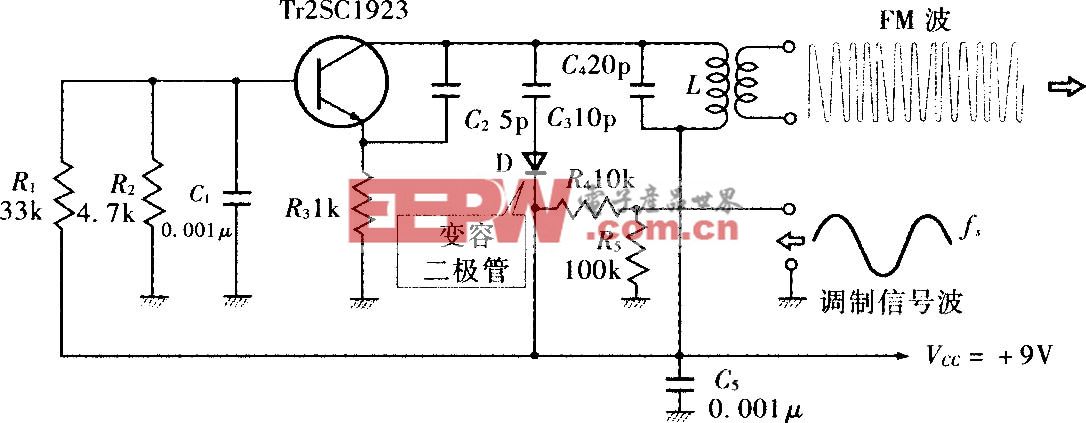
模擬電路相關文章:模擬電路基礎
pid控制器相關文章:pid控制器原理





評論