新型多功能智能小車的設(shè)計(jì)與應(yīng)用

L298N驅(qū)動(dòng)2個(gè)電機(jī),2、3腳和13、14腳之間分別接2個(gè)電動(dòng)機(jī)。5、7、10、12腳接輸入控制電平,控制電機(jī)的正反轉(zhuǎn),ENA(6腳),ENB(11腳)接控制使能端,控制電機(jī)的停轉(zhuǎn)。其中5、7、10、12腳分別接P1.0,P1.1,P1.2,P1.3,L29N的邏輯控制功能如表1所示。本文引用地址:http://www.czjhyjcfj.com/article/162121.htm

1.5 傳感器模塊
1.5.1 傳感器的安裝
傳感器的安裝如圖2所示,車頭一共有5個(gè)黑白線傳感器和3個(gè)金屬傳感器。中間的金屬傳感器(檢測(cè)距離為8 mm)是來檢測(cè)跑道上的鐵片,旁邊的2個(gè)金屬傳感器(檢測(cè)距離為4 mm)是來檢測(cè)距離引導(dǎo)線70 mm以上的金屬片的。由于在拐彎斷線處,小車可能會(huì)偏出軌道,無法繼續(xù)尋跡,故最外圍的2個(gè)黑白線傳感器就是使小車在偏離軌道一定范圍的情況下,仍能夠調(diào)整車頭,重新回到軌道上,故兩個(gè)傳感器的距離要盡量的遠(yuǎn),在不超出車身范圍的情況下。中間的黑白線傳感器的可擴(kuò)展為讓小車在斷線處仍能夠畫出斷線部分的軌跡(顯示一段斷線,屬于特色部分),另外兩個(gè)黑白線傳感器的任務(wù)就是讓小車完成基本的尋跡功能。

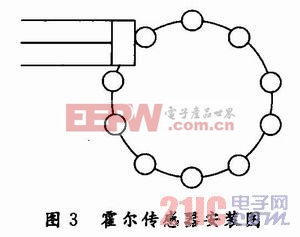
1.5.2 霍爾傳感器
霍爾傳感器是利用霍爾效應(yīng)實(shí)現(xiàn)磁電轉(zhuǎn)換的一種傳感器,它具有靈敏度高,線性度好,穩(wěn)定性高、體積小和耐高溫等特點(diǎn)。對(duì)測(cè)速裝置的要求是分辨能力強(qiáng)、高精度和盡可能短的檢測(cè)時(shí)間。
霍爾傳感器和磁鋼配套使用,用來計(jì)算小車的行駛路程。本作品用到兩個(gè)霍爾傳感器和20個(gè)磁鋼,左右后車輪各一對(duì)(1個(gè)霍爾傳感器和10個(gè)磁鋼),安裝方式如圖3所示。磁鋼數(shù)量越多,測(cè)量出的車輪圈數(shù)約精確,行駛路程也越精確。
1.5.3 金屬傳感器
選用的金屬傳感器為NPN常開型傳感器,理論的測(cè)測(cè)量距離為4 mm,傳感器輸出為1、0開關(guān)量信號(hào),當(dāng)金屬傳感器感應(yīng)到金屬片時(shí),其輸出由高電平變?yōu)榈碗娖健?/span>

霍爾傳感器相關(guān)文章:霍爾傳感器工作原理
霍爾傳感器相關(guān)文章:霍爾傳感器原理





評(píng)論