基于自抗擾控制器的PMSM矢量控制系統設計與實現

永磁同步電機PMSM(Permanent Magner Synchronous Machine)具有功率密度高、體積小、效率高、慣量小等優點,廣泛應用于數控機床領域[1]。然而PMSM是一個非線性、強耦合、參數攝動的多變量系統,對于外界擾動以及系統參數變化比較敏感,因此對于控制系統要求較高,既要具有高性能的軟硬件結構,又要具有高性能的控制策略和控制算法[2]。
為了提高PMSM控制性能, 國內外學者展開了廣泛研究。參考文獻[3]提出一種基于狀態觀測和反饋的控制策略, 參考文獻[4]提出一種基于自抗擾控制器的控制策略,這些方法具有良好的動靜態性能,卻未考慮電流環中耦合非線性因素的影響,無法從根本上解決非線性問題;參考文獻[5]提出一種基于模糊自適應PID及干擾觀測器的三環控制策略,但是這種方法算法較復雜,實時性較差。
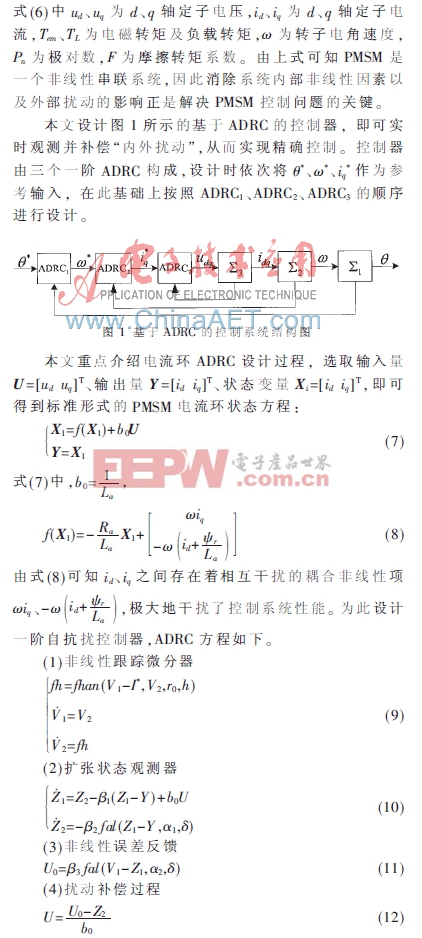
本文提出并實現了一種基于自抗擾控制器[6-7](ADRC)的PMSM矢量控制系統。首先設計基于ADRC的控制器,實時觀測出由系統內部非線性因素以及外部擾動引起的“內外擾動”并進行補償,從而實現精確控制。其次自行研制了基于DSP的多軸運動控制卡,并在此基礎上實現了基于ADRC的矢量控制系統。仿真及實驗結果表明,系統具有良好的動態性能及魯棒性,能夠快速加工出符合要求的模型。
1 ADRC數學模型
自抗擾控制器是一種基于誤差反饋的新型控制器,主要由非線性跟蹤微分器(NTD)、擴張狀態觀測器(ESO)、非線性誤差反饋(NLSEF)三部分組成,對于形如式(1)的非線性不確定對象具有良好的控制效果。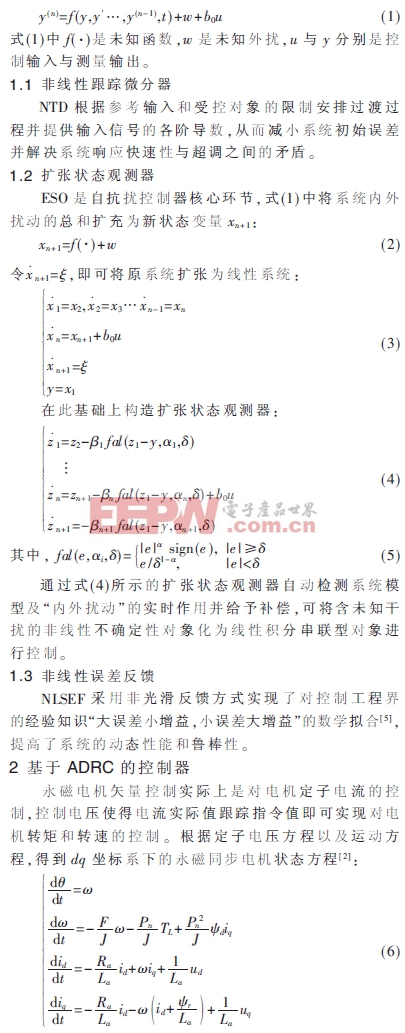

pid控制器相關文章:pid控制器原理










評論