基于PMC6496運動控制器的機械手上下料系統(tǒng)

一 PMC6496的特點
PMC6496運動控制器是雷賽公司在獨立式運動控制器的基礎(chǔ)上,精心研發(fā)的一款具有PLC特點的高性能產(chǎn)品。由于其全面支持IEC61131-3標準梯形圖編程語言,在邏輯控制上完全可以與中、小型PLC媲美。同時,其強大的運動控制功能更是傳統(tǒng)中、小型PLC無法匹敵的。
1 .PMC6496的硬件性能
圖1為PMC6496運動控制器的硬件結(jié)構(gòu)圖。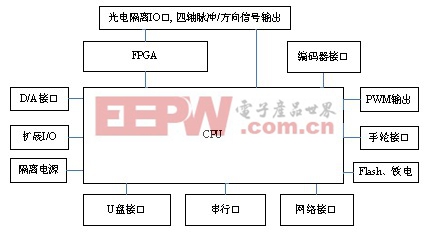
圖1 PMC6496運動控制器硬件結(jié)構(gòu)
PMC6496基于嵌入式處理器和FPGA的硬件結(jié)構(gòu),插補算法、脈沖信號的產(chǎn)生及加速和減速控制、I/O信號的檢測處理,均由硬件和固件實現(xiàn),確保了運動控制高速、高精度及系統(tǒng)穩(wěn)定。該系列控制器可控制4個步進或伺服電機,具有最高5MHz脈沖頻率、四軸直線插補、兩軸圓弧插補、連續(xù)曲線插補、S形曲線速度控制等高級功能。通過簡單的編程即可開發(fā)出穩(wěn)定可靠的高性能連續(xù)軌跡運動控制系統(tǒng)。
除了4個電機控制端口外,還提供了豐富的I/O接口和通訊接口:光電隔離I/O接口、擴展I/O接口、D/A輸出、PWM輸出、編碼器接口、手搖脈沖發(fā)生器接口。1個網(wǎng)絡(luò)接口、2個串行口,可通過網(wǎng)口或串口與PC機通信;同時還可以通過串口連接其它設(shè)備,如:手持編程器、觸摸屏、PLC等。可通過U盤接口用U盤方便地存儲文件和參數(shù)。Flash用于存儲用戶程序、鐵電存儲器用于參數(shù)的掉電保存。PMC6496的主要技術(shù)指標詳見表1。
表1 PMC6496控制器硬件性能
2. PMC6496的功能特性
PMC6496運動控制器運動控制性能優(yōu)異的,工作穩(wěn)定可靠,梯形圖編輯環(huán)境友好。其主要特點如下:
簡單易學(xué):由于梯形圖是自動化行業(yè)工程師最熟悉的編程語言,因此PMC6496的推出,大大降低了運動控制器的應(yīng)用門檻,使用戶更容易上手,快速開發(fā)自己的設(shè)備。
強大的運動控制功能:PMC6496可控制4軸步進電機或伺服電機進行4軸直線插補,任意2軸圓弧插補,多軸連續(xù)插補。可進行橢圓,螺旋等軌跡控制。并且,PMC6496配置了2048段指令緩沖,有效地保證了高速軌跡運動的連續(xù)性和平滑度。
友好的梯形圖編輯環(huán)境:全面支持IEC61131-3標準梯形圖編程語言,支持子程序,梯形圖比較,看門狗,單步調(diào)試等功能,梯形圖開發(fā)更加方便快捷。
HMI設(shè)備支持:PMC6496可與基于標準Modbus協(xié)議的人機界面進行通訊,包括:觸摸屏、文本顯示器、手持編程器等。用戶只需在人機界面設(shè)計時,按相應(yīng)的寄存器地址映射公式正確設(shè)置各種軟元件的Modbus地址即可,而幾乎不需要編寫任何程序代碼。
網(wǎng)絡(luò)通訊:PMC6496是一款基于10/100M以太網(wǎng)的PLC,可以使得梯形圖調(diào)試、下載等在線操作更加流暢。
二 機械手上下料的運動軌跡
某客戶的生產(chǎn)線上需要使用機械手上下料,結(jié)構(gòu)如圖2所示。X軸執(zhí)行水平左右運動,Y軸執(zhí)行豎直上下運動,手爪由氣缸控制執(zhí)行抓取動作。它們的任務(wù)是將右側(cè)工裝上的工件依次抓取至左側(cè)傳送帶上。X軸原點距離傳送帶上工件放置點為W,工裝上第一個工件距離傳送帶上工件放置點為S,工裝上每個工件之間的距離均為L。
圖2 機械手上下料系統(tǒng)組成
通常,大多數(shù)用戶會將X、Y的運動軌跡確定為矩形,即Y軸上下運動完成后X軸再水平運動,然后Y軸再次上下運動,如此反復(fù)進行。但這樣的方式會導(dǎo)致比較強烈的抖動,并且造成一定的時間浪費。
因此,可采用圖4所示的運動軌跡,在2個拐彎處,X、Y軸進行一段半徑為R的圓弧插補運動,這樣可大大減弱抖動,且能節(jié)省時間。A點為起始點,抓取并放置第1個工件的路徑為A→B→C→D→E→F→G→H→I→J→K,抓取并放置第2個工件的路徑與第一個相同,只不過A→B和F→G的距離增加了長度L,第3個、第4個、第5個亦然。
PMC6496支持連續(xù)插補運動,在連續(xù)插補模式下,速度是連續(xù)的,各插補段之間沒有加減速過程,從而使得運動更加平滑。運行CONTI_ENTER功能塊后進入連續(xù)插補模式,加入要求的插補運動軌跡,使用LINE_START功能塊啟動連續(xù)插補運動,PMC6496以連續(xù)插補模式運行完所有運動軌跡。
圖3 連續(xù)插補運動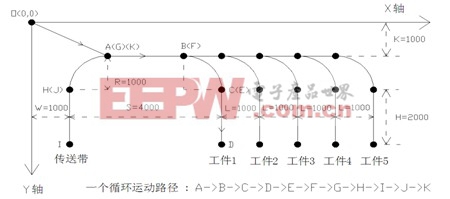
圖4 機械手上下料運動軌跡
三 機械手上下料控制系統(tǒng)流程
繪制流程圖,如圖5所示。每次啟動時,將抓取次數(shù)重置為0,抓取5次后結(jié)束。“夾緊”和“松開”為氣缸動作。
圖5 機械手上下料流程圖
四 機械手上下料控制系統(tǒng)的程序
機械手上下料控制系統(tǒng)程序如圖6所示。
圖6 機械手上下料程序(程序1-4節(jié))
圖6(續(xù)2) 程序5-22節(jié)

伺服電機相關(guān)文章:伺服電機工作原理










評論