基于STM32F107的搬運(yùn)機(jī)器人電機(jī)控制系統(tǒng)設(shè)計(jì)

2.5 舵機(jī)控制任務(wù)
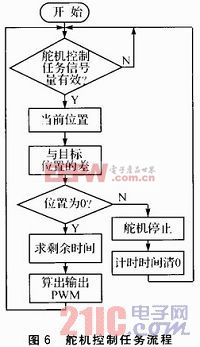
舵機(jī)控制由一個(gè)定時(shí)器產(chǎn)生基準(zhǔn)時(shí)間,每隔固定時(shí)間發(fā)送信號(hào)量,任務(wù)都將執(zhí)行一次。舵機(jī)控制任務(wù)將對(duì)絕對(duì)值編碼器測(cè)出的位置和給定的位置進(jìn)行比較,根據(jù)剩余時(shí)間調(diào)整舵機(jī)的轉(zhuǎn)速。舵機(jī)控制任務(wù)流程如圖6所示。本文引用地址:http://www.czjhyjcfj.com/article/160667.htm
3 系統(tǒng)機(jī)電接口
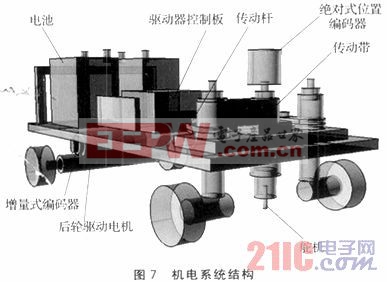
機(jī)器人的舵機(jī)由直流電機(jī)外連一個(gè)30:1的減速機(jī)組成。絕對(duì)式位置編碼器同舵機(jī)相連,將舵機(jī)的角度信號(hào)送到驅(qū)動(dòng)器控制板中。機(jī)器人前輪的兩個(gè)軸由傳動(dòng)桿相連,其中一個(gè)軸由傳動(dòng)帶與舵機(jī)相連,這樣在舵機(jī)轉(zhuǎn)動(dòng)時(shí),傳動(dòng)帶帶動(dòng)傳動(dòng)桿,保證兩個(gè)前輪能夠同步轉(zhuǎn)動(dòng)。后輪驅(qū)動(dòng)電機(jī)為直流電機(jī),直接與增量式編碼器相連,經(jīng)減速比為25:1減速機(jī)減速后,經(jīng)機(jī)械差速器驅(qū)動(dòng)后輪轉(zhuǎn)動(dòng)。增量式編碼器的信號(hào)同樣送到驅(qū)動(dòng)器控制板中。機(jī)電系統(tǒng)結(jié)構(gòu)如圖7所示。
結(jié)語(yǔ)
本文實(shí)現(xiàn)了搬運(yùn)機(jī)器人的電機(jī)和舵機(jī)控制器硬件的設(shè)計(jì),成功地在STM32F107上嵌入了實(shí)時(shí)操作系統(tǒng)μC/OS-II,完成了電機(jī)和舵機(jī)的轉(zhuǎn)速閉環(huán)實(shí)驗(yàn)。利用Cortex-M3內(nèi)核控制器和μC/OS-II系統(tǒng)多任務(wù)實(shí)時(shí)性的特點(diǎn),為后續(xù)的機(jī)器人圖像視頻采集和導(dǎo)航尋跡提供了軟硬件基礎(chǔ)。如果對(duì)現(xiàn)有PI算法進(jìn)行改進(jìn),并且能夠?qū)崿F(xiàn)電機(jī)速度和電流雙閉環(huán)控制,則機(jī)器人電機(jī)的特性將會(huì)更好,搬運(yùn)機(jī)器人的應(yīng)用前景將更加廣闊。











評(píng)論