小麥硬度檢測控制器的設計

2.3 電機控制電路設計
系統通過電機精確控制絲桿上的滑動模塊向下運動以提供均勻壓力。根據系統的需求,選用富士FALDIC-W型號的伺服電機作為執行器。伺服電機的速度的控制使用方波信號,方波的頻率控制電機的速度,在應用中使用S3C2410的GPB0引腳的TOUT0。伺服電機方向的控制需要電平信號,系統中對電機的方向的控制使用GPB1的普通I/O口,通過輸出0、1數字信號完成對電機正反方向的控制。由于對電機速度和方向需要差動信號,要對控制器發過來的脈沖和電平控制信號使用四路差動線路驅動器MC3487進行轉化為差動信號再送給伺服控制器,電路如圖3所示。本文引用地址:http://www.czjhyjcfj.com/article/160512.htm

2.4 位移檢測電路設計
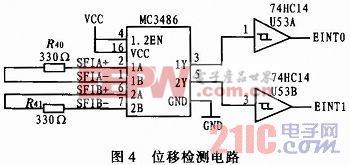
位移檢測主要是根據伺服電機的編碼器在伺服電機轉動時反饋的脈沖數來確定探針的移動位移。其中編碼器在電機轉動一周時所發送的脈沖數可以通過伺服單元的設置模式進行設置,設置范圍為16~32 768個/轉。反饋過來的脈沖信號也是差動信號,對電機反饋過來的脈沖差動信號需要使用MC3486來轉化為控制器所要的脈沖信號。這樣就可以利用控制器的外部中斷來檢測脈沖的個數。然后利用式(1)實時的測定位移傳感器探頭的位移。電路如圖4所示。為了提高準確的檢測編碼器發出的脈沖個數,這里使用了兩路脈沖檢測。其中,SFIA+、SFIA-、SFIB+和FIB-是編碼器的兩相差動信號,通過MC3486轉為脈沖信號,再通過74HC14施密特觸發器整形后,獲得較理想的矩形脈沖,然后送到外部中斷進行脈沖計數。
3 驅動軟件設計
設備驅動程序是操作系統內核和機器硬件之間的接口。設備驅動程序主要完成對設備進行初始化和釋放,把數據從內核傳送到硬件和從硬件讀取數據、讀取應用程序傳送給設備文件的數據。Linux為所有的設備文件都提供了統一的操作函數接口,方法是使用數據結構struct file_operations。這個數據結構中包括許多操作函數的指針,如open()、close()、read()和write()等。

伺服電機相關文章:伺服電機工作原理









評論