基于PAC的電機(jī)控制器快速控制原型的研究

從功能架構(gòu)可以看出,NICompact RIO硬件上配備模擬輸入模塊、數(shù)字輸出模塊、基于FPGA的高速RIO、浮點(diǎn)運(yùn)算器、大容量非易失存儲(chǔ)介質(zhì),軟件上配備實(shí)時(shí)操作系統(tǒng)、運(yùn)動(dòng)控制模塊、數(shù)據(jù)分析模塊、網(wǎng)絡(luò)數(shù)據(jù)交互模塊。對(duì)于控制電機(jī)需用到的PWM接口、編碼器接口、模擬輸入接口、高速運(yùn)算器和快速控制原型需要的可重配置性、實(shí)時(shí)在線調(diào)節(jié)參數(shù)、數(shù)據(jù)存儲(chǔ)功能NICompact RIO都可以實(shí)現(xiàn)。因此NICompact RIO是一個(gè)適合做電機(jī)控制器RCP的PAC平臺(tái)。
2 永磁同步電機(jī)磁場(chǎng)定向(FOC)控制
電動(dòng)汽車用電機(jī)系統(tǒng)需要具有控制穩(wěn)定、響應(yīng)速度快、系統(tǒng)效率高的特點(diǎn)。矢量控制是1971年西門子工程師F-Blaaschke首次提出的,其基本思想是通過坐標(biāo)變換,將靜止坐標(biāo)系中定子電流空間矢量is分解為dq旋轉(zhuǎn)坐標(biāo)系中的兩個(gè)分量:勵(lì)磁電流分量id和與之垂直的轉(zhuǎn)矩電流分量iq。在工作過程中,通過對(duì)id和iq的大小進(jìn)行控制,便可獲得與直流電機(jī)相當(dāng)?shù)膭?dòng)態(tài)性能。因其控制結(jié)構(gòu)簡單,控制軟件實(shí)現(xiàn)較容易,已被廣泛應(yīng)用到調(diào)速系統(tǒng)中。本文引用地址:http://www.czjhyjcfj.com/article/160481.htm
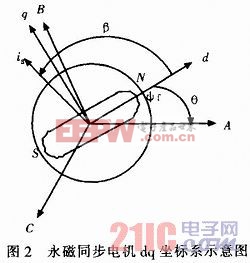
圖2是永磁同步電機(jī)在dq旋轉(zhuǎn)坐標(biāo)系下的模型,其定子磁鏈方程為式(1);電壓方程為式(2);電磁轉(zhuǎn)矩方程為式(3)。

式(1)~(3)中,ψd為d軸磁鏈,ψq為q軸磁鏈,id為d軸電流,iq為q軸電流,ud為d軸電壓,uq為q軸電壓,ψf為永磁體產(chǎn)生的磁鏈,是常數(shù):ω為轉(zhuǎn)子電角速度;Ld為d軸等效線圈的自感;Lq為q軸等效線圈的自感;P為電機(jī)極對(duì)數(shù);Tem為電磁轉(zhuǎn)矩;is為定子電流矢量;β為電機(jī)功角。
磁場(chǎng)定向控制(FOC)又稱為id=0控制,即在矢量控制中使勵(lì)磁電流分量保持為零;通過控制轉(zhuǎn)矩電流分量來控制電機(jī)輸出的電磁轉(zhuǎn)矩,此時(shí)的電磁轉(zhuǎn)矩為:
Tem=Pψfiq (8)
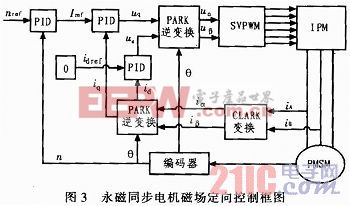
FOC主要由電流和速度采集模塊、坐標(biāo)變換模塊、PID模塊、SVPWM模塊組成,圖3為FOC的框圖。

pid控制器相關(guān)文章:pid控制器原理










評(píng)論