十字路口智能交通燈控制系統的FPGA實現

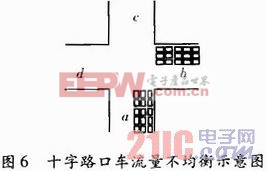
系統主要適應十字路口車流量不均衡的狀態,設定十字路口車流量狀況為a車道、b車道車流量大,c車道、d車道車流量小,如圖6所示。利用EDA軟件Quartus II 7.2,通過硬件描述語言VHDL進行模擬設計和仿真,可得此狀態下智能交通控制系統的仿真結果,如圖7所示。本文引用地址:http://www.czjhyjcfj.com/article/159773.htm
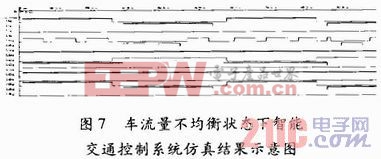
統計圖7中100s內a車道、b車道3種車輛通行方向的車輛通行時間,可得a車道、b車道直行方向車輛通行平均概率為(50+40)/200=45%,a車道、b車道左轉、右轉方向車輛通行平均概率為(46+18+50+57)/400=42.75%。
比較傳統模式下的交通控制系統和智能交通控制系統在十字路口車流量不均衡狀態下的車輛通行概率,可以發現,道路直行方向的車輛通行概率從33.33%提升到了45%,道路左轉、右轉方向的車輛通行概率從8.33%提升到了42.75%。因此,在車流量不均衡的情況下,本智能交通控制系統相對傳統模式下的交通控制系統,提高了十字路口的車輛通行效率,也滿足了預期的設計要求。
4 硬件設計與測試
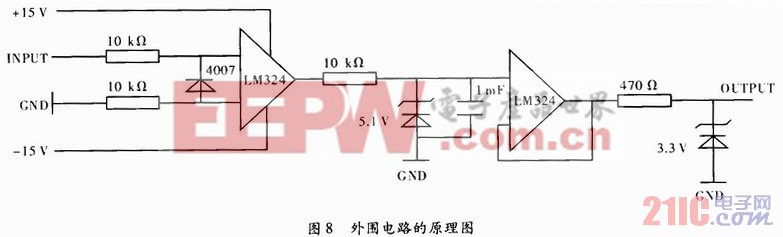
完成了智能交通控制系統的設計、編譯、仿真后,將設計程序中輸入、輸出端口進行引腳綁定并下載到開發板上EP1C6Q240C8核心芯片中。制作外圍電路如圖8所示,并4路直行方向綠燈信號和4路左轉方向綠燈信號接入到開發板上的8個數碼管上,調整外圍電路的輸入電壓,觀察數碼管狀態。通過實際測試,8個數碼管的顯示結果正常,運行穩定、可靠,達到了設計要求。
5 結束語
利用EDA軟件Quartus II 7.2,采用硬件描述語言VHDL進行編程,實現了智能交通控制系統的設計、仿真,并利用EP1C6Q240C8 FPCA芯片制作成控制系統進行測試,實現了對交通信號燈相對方向不同步的控制功能,可在實際應用中提高城市十字路口的車輛通行效率,緩解城市的交通壓力。本設計具有設計效率高、成本低、可靠性強、維護容易及可擴展性強等優點,展現了EDA技術和FPGA器件在智能交通控制方面應用的優越性。












評論