基于DSP的鋁電磁鑄造磁場控制器的設計和實現

(5)人機接口設計
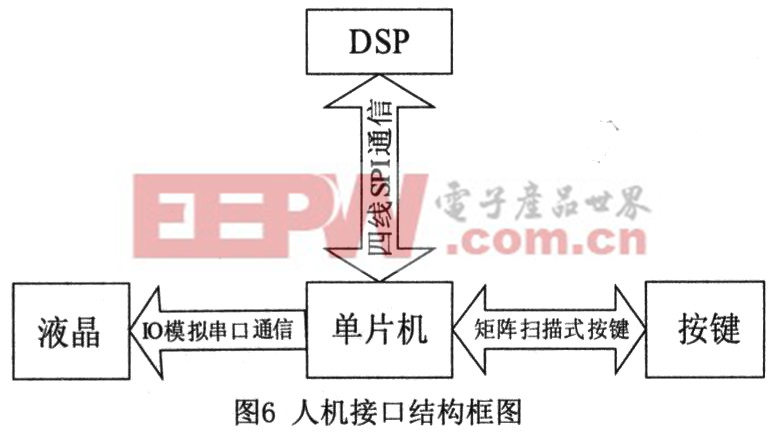
人機接口處理采用專門的單片機進行管理,單片機與系統主控制核心DSP間采用SPI總線形式通信,編程簡單且實現容易。單片機主要完成鍵盤掃描(參數的設置等)、液晶顯示(運行檢測的參數顯示)功能。根據人機接口功能的需要,考慮性價比,選用新華龍推出的C8051F410單片機,顯示裝置則選擇北京青云公司的LCM128×64藍色背光液晶,按照總體設計規劃設置6個按鍵,采用矩陣式結構即可。人機接口框圖如圖6所示。 本文引用地址:http://www.czjhyjcfj.com/article/152311.htm
1.2 系統軟件設計
(1)系統軟件架構
鑒于整個系統要實現的任務繁多,DSP各外設均被應用,對處理的實時性要求比較高,并且DSP(TMS320F2808)平臺支持和能承載RTOS的開發,所以系統軟件采用mC/OS-II設計。mC/OS-II是一種源碼公開、可移植、可固化(ROMable)、可裁減(scalable)、可剝奪性(preemptive)、占先式的實時多任務操作系統[3,5]。整個系統軟件分為兩步:a.μ C/OS-II到DSP移植;b.μC/OS-II平臺上軟件的編寫。μ C/OS-II到DSP移植只需要修改與處理器相關的OS_CPU.H、OS_CPU_C.C和OS CPU A.A三個文件的代碼,移植的工作量相對較小。由于μ C/OS-II是基于優先級的搶占式實時多任務操作系統,因此,在進行代碼編寫之前,應先確認系統的任務數,每個任務的優先級別,并為每個任務分配一定數量的堆棧空間以供運行時調用。也就是說,要首先對復合磁場控制系統軟件的各功能模塊進行管理。
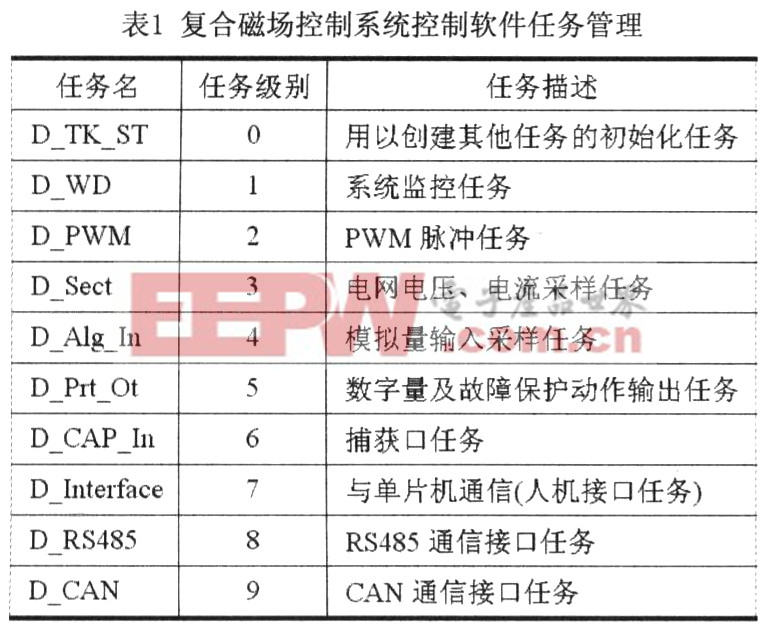
根據復合磁場控制系統的特殊性,將控制軟件分為0~9十個級別,表1為軟件各功能模塊以及分別對應的任務名稱、任務優先級別。
控制程序的流程是:首先進行CPU及程序數據初始化;再進行操作系統初始化,主要完成任務控制塊(TCB)初始化、TCB優先級表初始化、TCB鏈表初始化、事件控制塊(ECB)鏈表初始化、空任務的創建等等;然后創建任務D TK ST,在任務D TK ST中再創建其他任務;最后啟動多任務調度。在多任務調度開始后,啟動時鐘節拍源開始計時,此節拍源給系統提供周期性的時鐘中斷信號,實現延時和超時確認。當時鐘中斷來臨時,系統把當前正在執行的任務掛起,保護現場,進行中斷處理,判斷有無任務延時到期,若有,則使該任務進入就緒態,并把所有進入就緒態的任務的優先級進行比較,通過任務切換去執行最高優先級的任務,若沒有別的任務進入就緒態,則恢復現場繼續執行原任務。任務之間通過信號量和消息郵箱進行通信,任務和中斷之間通過消息郵箱進行通信。
在保證功能實現的基礎上,為進一步提高系統的可靠性,增加了系統監控任務。該任務功能是監視系統其他任務的運行。被監視任務在其即將運行完畢時監視任務發送消息說明自身運行正常。被監視任務運行時,監視任務等待被監視任務給它發送消息,等待時間被設定為預計的任務正常運行所需的最大時間。若等待時間內監視任務收到消息,則認為發送消息的任務運行正常,依照各任務執行順序的開始運行下一任務,監視任務等待下一任務發送的消息。若等待時間已過,監視任務仍未收到消息,則系統的時間管理函數將強行把監視任務視為就緒狀態。因為監視任務的優先權是最高的,它將搶占對CPU的控制權并采取相應的糾錯方案以保證系統的穩定運行。











評論