基于DSP+FPGA的機器人語音識別系統的設計

4 機器人的動作控制系統設計
4.1 FPGA邏輯設計
系統通過語音控制機器人頭部動作,頭部運動分為上下和左右運動2個自由度,需要2個步進電機控制,DSF完成語音識別以后,輸出相應的動作指令,動作執行結束后,DSP發出歸零指令,頭部回到初試狀態。FPGA的作用是提供DSP接口邏輯,設置存儲DSP指令的RAM塊,同時產生步進電機驅動脈沖控制步進電機轉動方向和角度。
FPGA器件為動作指令控制單元,設計采用FLEXlOKE芯片,接收DSP數據后并行控制2路步進電機。FPGA內部結構邏輯如圖4所示,FPGA內部設置2個元件為電機脈沖發生器,控制電機的工作脈沖以及正反轉。AO~A7為DSP數據輸入端口,WR為數據寫端口,P1,P2為2個步進電機驅動芯片脈沖輸入口,L1,L2為電機正反轉控制口,ENABLE為使能信號。
本文引用地址:http://www.czjhyjcfj.com/article/151217.htm
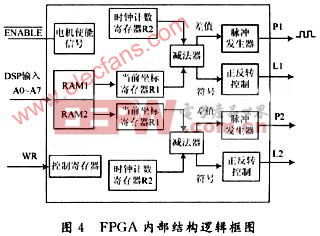
RAM1和RAM2分別為2個步進電機的指令寄存器,電機脈沖發生器發出與RAM中相應數量的方波脈沖。DSP通過DO~D8數據端輸出8位指令,其中。 D8為RAM選擇,為1時選擇RAM1,為0時選擇RAM0,DO~D7為輸出電機角度,電極上下和左右旋轉角度為120°,精度為1°,初始值都為 60°,DO~D7的范圍為00000000~11111000,初始值為00111100。FPGA作為步進脈沖發生器,通過時鐘周期配置控制電機轉速,與初始值對應坐標決定正反轉。系統動作指令程序如圖5所示。
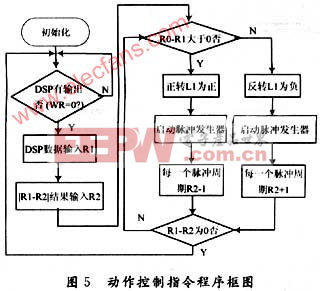
其中R1為DSP指令寄存器,R2為當前坐標寄存器,通過DSP的輸出坐標與FPGA的當前坐標進行差值運算來確定步進電機的旋轉方向和旋轉角度,優點是可以根據新的輸入指令的變化,結束當前動作以運行新的指令,指令執行完畢后,系統清零,步進電機回到初始狀態。
4.2 FPGA邏輯仿真
FPGA以MAX-PLUSⅡ開發平臺,用語言為VHDL語言對上述邏輯功能進行設計,并通過JTAG接口進行了調試,FLEXl0KE芯片能夠根據DSP輸出指令輸出正確的正反轉信號和脈沖波形。
4.3 步進電機驅動設計
FPGA通過P1,L1,P2,L2輸出控制控制步進電機驅動芯片。步進電機驅動采用的是東芝公司生產的單片正弦細分二相步進電機驅動專用芯片TA8435H,FPGA與TA8435H電路連接如圖6。
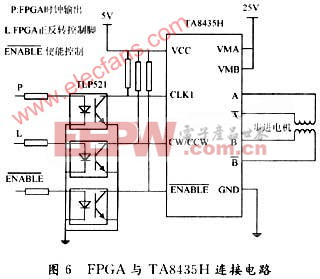
由于FLEX1OKE和TMS320VC5509工作電壓為3.3 V,而TA8435H為5 V和25 V,所以管腳連接使用光電耦合器件TLP521,使兩邊電壓隔離。CLK1為時鐘輸入腳,CW/CCW為正反轉控制腳,A,A,B,B為二相步進電機輸入。
5 結 語
系統充分利用了DSP的高處理速度和可擴展的片外存儲空間,具有高速、實時、識別率高的特點并支持大的語音庫,FPGA的使用使系統電路獲得簡化,一片 FLEXl0KE芯片可以完成2個步進電機的時序控制。雖然在處理速度和語音庫的存儲容量上與PC機系統具有一定的差距,但在機器人的微型化、低功耗和特定功能實現上,以DSP和FPGA為核心的嵌入式系統無疑具有廣闊的前景。










評論