基于DSP的永磁同步電機伺服控制系統設計

4.1 電流環實驗
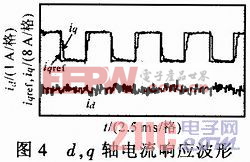
電流環是內環,其動態響應特性直接關系到矢量控制策略的實現。實驗中,給定電機定子q軸電流分量iqref為±8 A方波信號,給定d軸電流分量idref為零,使電機在電流環模式下運行,d,q軸電流響應如圖4所示。其中電流控制器比例系數Kp=0.72,積分系數Ki=0.06。
由圖可知,實際q軸電流快速跟蹤其給定值,電流階躍8 A響應時間約為0.5 ms,且基本無超調;實際d軸電流控制在其給定值零附近,電流脈動僅有±0.4 A。實驗結果達到電流環的設計目的。本文引用地址:http://www.czjhyjcfj.com/article/149533.htm
4.2 速度環實驗
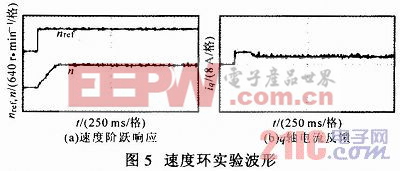
速度給定決定于外部脈沖頻率,其中Kp=2.14x10-2,Ki=1.62x10-6。其速度階躍響應波形如圖5所示。可知,速度階躍響應時間約為250 ms,速度動態響應較快,穩態時速度跟蹤穩定。
4.3 位置環實驗
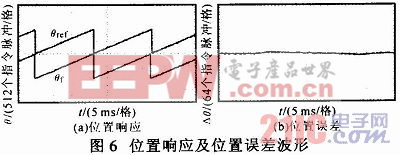
位置給定采用外部脈沖給定。在連續輸入指令脈沖電機連續運行時,位置響應及其誤差波形如圖6所示。θref表示位置脈沖給定Pg,θf表示位置反饋Pf。圖6b為位置誤差波形。可見,電機連續運行,位置跟蹤穩態誤差均值為零;動態脈動±12個指令脈沖,對應機械角誤差為±1.08°,實驗結果表明位置環工作穩定。
5 結論
以TMS320F2808 DSP為核心,結合永磁伺服控制特點,設計了一套永磁同步電動機伺服控制系統,實驗結果表明:①單片TMS320F2808型DSP資源即可最大限度地滿足永磁同步電動機伺服控制需要,系統成本低廉;②電流環響應迅速、速度和位置閉環控制無穩態誤差,所設計系統工作速度快,且工作可靠。

伺服電機相關文章:伺服電機工作原理










評論